一类不确定时滞关联非线性系统分散鲁棒H∞控制
桂卫华, 刘碧玉
(中南大学 信息科学与工程学院, 湖南 长沙, 410083)
摘要: 在非线性项满足全局Lipschitz条件下, 研究了一类不确定时滞关联非线性系统分散鲁棒H∞控制问题。 基于Lyapunov泛函及线性矩阵不等式的分析方法, 得到了由无记忆状态反馈分散控制器使整个关联系统可镇定且满足给定的H∞性能的充分条件。 考虑的不确定时滞关联非线性系统具有时变未知且满足一定匹配条件的不确定参数和状态时滞。 获得的鲁棒镇定判据与系统时滞的大小无关。
关键词: 时滞关联系统; H∞控制; 线性矩阵不等式; 非线性
中图分类号:TP13 文献标识码:A 文章编号: 1672-7207(2005)05-0846-06
Decentralized robust H∞ control for a class of uncertain interconnected nonlinear systems with time delays
GUI Wei-hua, LIU Bi-yu
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: This paper elaborates on decentralized robust H∞ control for a class of uncertain interconnected nonlinear systems with time delays. The nonlinearities are assumed to satisfy the global Lipschitz conditions. Based on the Lyapunov functional and linear matrix inequality methods, some sufficient conditions are obtained to guarantee the internal stability of the system and the given H∞ performance. The decentralized controllers used are linear and memoryless state feedbacks. The uncertain nonlinear delay interconnected systems under consideration are described by state differential equation with time-varying unknown uncertain parameters satisfying some matching conditions and delayed state. The criteria of robust stabilization are independent on the size of the delays.
Key words: interconnected systems with time delays; H∞ control; linear matrix inequality; nonlinear
时滞关联系统分散鲁棒H∞控制理论是在H∞空间即Hardy空间通过某些性能指标的无穷范数优化而获得具有鲁棒性能的分散控制器的一种控制理论。 近年来, 这个问题已经受到了人们普遍的关注[1-10]。 许多学者利用代数Riccati不等式或线性矩阵不等式方法, 根据参数不确定性的不同描述, 提出了各种分散鲁棒H∞性能分析和控制器的设计方法。 M.S.Mahmiud[1]利用代数Riccati不等式和基于分散状态观测器的设计, 研究了一类具有时滞和范数有界不确定性的关联系统的鲁棒镇定和性能问题。 文献[4, 5]采用线性矩阵不等式的分析方法和基于分散状态反馈, 研究了一类不确定的时滞关联系统的分散鲁棒H∞控制问题。 这些研究针对的对象都是线性关联系统且对关联项的分析和处理上采用的是结构分解法[11], 即把大系统的分散控制器的设计归结为求解一系列的代数Riccati方程或求解一系列的线性矩阵不等式。 关于具有时滞的关联非线性系统的分散鲁棒H∞控制的研究较少。 在此,作者研究一类具有时滞的不确定性的关联非线性系统的分散鲁棒H∞控制问题, 在非线性项满足全局Lipschitz条件下, 基于线性矩阵不等式得到一些分散状态反馈鲁棒H∞控制问题有解的充分条件。
1 问题的描述与定义
考虑一类由N个子系统Si构成的不确定时滞关联非线性系统:
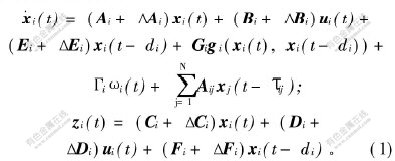
其中: i=1,2,…,N; xi(t)=φi(t); t∈[-τ,0]; τ=max[DD(X]i[DD)]{di, τij}; xi(t)∈Rni为状态向量, ui(t)∈Rmi, 为控制向量, ωi(t)∈Rpi, 为平方可积的外部扰动信号; zi(t)∈Rli, 为控制输出向量; Ai, Bi, Ci, Di, Ei, Fi, Gi, Γi和Aij为具有适当维数的常数矩阵; gi(xi(t), xi(t-di))为已知非线性函数矩阵; di≥0, 为系统的状态滞后时间; τij≥0是系统的关联项滞后时间; τ=max[DD(X]i[DD)]{di, τij}; φi(t)为定义在[-τ, 0]上的实值连续的初值函数, ΔAi, ΔBi, ΔCi, ΔDi, ΔEi和ΔFi为未知矩阵, 描述了时变参数不确定性, 它们有如下数值界:

Fi(t)是具有适当维数的Lebsegue可测的时变未知矩阵, 且FTi(t)Fi(t)≤Ii; Ii为适当维数的单位矩阵; Si, Li, Mi, Ni, Ri为具有适当维数的常数矩阵。 令

在此, 对系统的非线性函数矩阵作如下假设。
假设1 (Lipschitz条件):
a. gi(0, 0)=0;
b. ‖gi(xi1, xi2)-gi(yi1, yi2)‖≤

其中, Θi1和Θi2为已知的常数矩阵。
针对系统(1)设计分散状态反馈控制器ui(t)=Kixi(t)(i=1,2,…,N), 使得闭环系统:

满足以下性质:
a. 闭环系统(4)是内部渐近稳定;
b. 从外部扰动ω(t)被控输出z(t)的传递函数Gωz(s)的H∞范数不超过给定的常数γ>0, 即在零初始条件xi(t)=0, t∈[-τ,0](i=1,2,…,N)下, 有

具有以上性质的控制器ui(t)=Kixi(t),(i=1,2,…,N)称为系统(1)的分散H∞控制器。 不等式(5)反映了系统对外部扰动的抑制能力, 因此, γ也称为系统对外部扰动的抑制度。 γ越小, 表明系统的性能越好。
2 分散鲁棒控制器的设计
借用线性矩阵不等式方法解决系统(1)的分散鲁棒H∞控制问题。 首先, 引进如下引理。
引理1[12]: 设A, D, E, P和F(t)是具有适当维数的矩阵, 且P>0, F(t)满足FT(t)F(t)≤I, 则下列不等式成立:
(1) 对任意常数ε>0, 和向量x∈Rn, y∈Rn, 有
2xTDF(t)Ey≤ε-1xTDDTx+εyTETEy。
(2) 对任意满足εI-DTPD>0的常数ε>0, 有
(A+DF(t)E)TP(A+DF(t)E)≤ATPA+ATPD(εI-DTPD)-1DTPA+εETE。
定理1:对于不确定的时滞关联非线性系统(1), 若假设1成立, 对于给定的常数γ>0, 如果存在常数εi>0, ηi>0, μi>0和正定矩阵Pi>0, Qi>0, Hi>0使得μiIi-LTiLi>0, 且矩阵不等式(6)成立, 则其中至少存在一个i∈{1, 2, …,N}, 不等式(6)是严格的。 则系统(1)是渐近稳定的, 且在零初始条件下, 对于任意非零的ω(t)∈L2[0, ∞)有‖z(t)‖22≤γ‖ω(t)‖22。
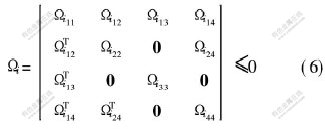
其中,

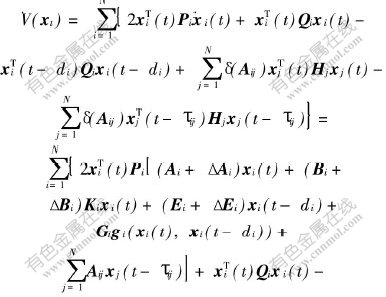
证明 首先证明当ωi(t)=0, i=1,2,…,N时, 闭环系统(4)是渐近稳定的。 考虑下列Lyapunov-Krasovskii泛函:

这里,  xt=x(t+σ), σ∈[-τ,0]。 V(xt)沿系统(4)的导数为:
xt=x(t+σ), σ∈[-τ,0]。 V(xt)沿系统(4)的导数为:

应用假设1, 有

由式(2),(9)以及引理1, 对于任意的εi>0, ηi>0, i=1, 2, …,N, 可推得

将式(10)和(11)代入式(8)可得:


其中:

另一方面, 由式(6)易知至少存在一个i∈{1,2,…,N}, 使得

其中:

因此,
因此, 。 故当ωi(t)=0(i=1,2,…,N)时, 闭环系统(4)是渐近稳定的。
。 故当ωi(t)=0(i=1,2,…,N)时, 闭环系统(4)是渐近稳定的。
为了证明在零初始条件下, ‖z(t)‖ ≤γ‖ω(t)‖成立, 令
≤γ‖ω(t)‖成立, 令

在零初始条件下及V(xt)的正定性, 有

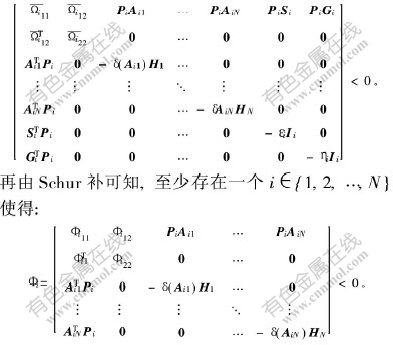
由式(4), (10), (11), (16)和(17)可得

其中:

由Schur补易证, 矩阵不等式(6)成立能保证至少存在一个i∈{1, 2, …, N}使得

因此, J〈0, 即‖z(t)‖≤γ‖ω(t)‖, 定理证毕。
定理2 对于不确定的非线性时滞关联系统(1), 若假设1成立, 对于给定的常数γ>0, 如果存在常数εi>0, ηi>0, μi>0和正定矩阵 Xi>0, Zi>0, Ui>0和矩阵Yi使得Ξi=μiIi-LTiLi>0, 且满足线性矩阵不等式(19), 其中至少存在一个i∈{1, 2, …, N}, 不等式(19)是严格的。 则系统(1)是可分散镇定, 分散状态反馈控制器为μi (t)=YiX-1i・xi (t), i=1, 2, …, N, 且在零初始条件下, 对于任意非零的ω(t)∈L2[0, ∞)有‖z(t)‖≤γ‖ω(t)‖。

证明 根据定理1, 将矩阵不等式(6)等价变换为

对(20)式左边的矩阵分别左乘和右乘对角矩阵diag(P-1i, P-1i, P-11, …, P-1N)得

3 结 论
利用Lyapunov 泛函及线性矩阵不等式方法讨论了一类不确定时滞关联非线性系统分散鲁棒H∞控制问题. 在非线性项满足全局Lipschitz条件下, 给出了一些分散状态反馈鲁棒H∞控制问题有解且与时滞无关的充分条件, 并将分散鲁棒H∞控制问题转化为一些典型的线性矩阵不等式的求解问题。 其求解可利用MATLAB 中的线性矩阵不等式工具箱求得。
参考文献:
[1]Mahmoud M S, Zribi M. Robust and H∞ stabilization of interconnected systems with delays[J]. IEEE Proc Control Theory Appli, 1998, 145(6): 559-567.
[2]Yang G H, Wang J L. Decentralized H∞ controller design for composite systems: linear case[J]. Int J Control, 1999, 72(9): 815-825.
[3]Yang G H, Wang J L, Soh C B, et al. Decentralized H∞ controller design for nonlinear systems[J]. IEEE Trans Automatic Control, 1999, 44(3): 578-583.
[4]尚群立, 薛安克, 孙优贤. 时滞不确定线性大系统分散鲁棒H∞控制[J]. 自动化学报, 2000, 26(5):695-699.
SHANG Qun-li, XUE An-ke, SUN You-xian. Decentralized robust H∞ control for uncertain interconnected linear large-scale system with delay[J]. Acta Automatica Sinica, 2000, 26(5):695-699.
[5]程储旺. 不确定性时滞大系统的分散鲁棒H∞控制[J]. 自动控制学报, 2001, 27(3):361-366.
CHENG Chu-wang. Decentralized robust H∞ control of uncertain delay large-scale systems[J]. Acta Automatica Sinica, 2001, 27(3):361-366.
[6]Liu H, Xu B, Zhu X. An LMI approach to decentralized H∞ controller design of a class of uncertain large-scale interconnected time-delay systems[J]. Control Theory and Applications, 2001, 18(6):954-960.
[7]CHEN Ning, GUI Wei-hua, XIE Yong-fang, et al. Decentralized H∞ control for linear interconnected large-scale systems with time-delay[A]. Proceedings of the 14th World Congress IFAC[C]. Kidington: Elsevier Sci, 1999. 87-92.
[8]俞立. 鲁棒控制――线性矩阵不等式[M]. 北京:清华大学出版社, 2002.
YU Li. Robust Control――LMI[M]. Beijing: Tsinghua University Press, 2002.
[9]Shen T, Tamura K. Robust control of uncertain nonlinear systems via state feedback[J]. IEEE Trans Automatic Control, 1995, 40(4): 766-768.
[10]Shen T, Zang H, Tamura K. Riccati equation approach to robust gain synthesis for a class of uncertain nonlinear systems[J]. Int J Control, 1996, 64(6): 1177-1188.
[11]Chen Y H. Structural decomposition and new algebraic method for large-scale systems[J]. Int J Systems Science, 1990, 21(2): 241-255.
[12]Wang Y, Xie L, De Souza C E. Robust control of a class of uncertain non-linear systems[J]. Systems Control Letters, 1992, 19: 139-149.
收稿日期:2004-12-22
基金项目: 国家重点基础研究发展规划项目资助(973项目)(2002CB312200)
作者简介:刘碧玉(1964-), 女, 湖南邵东人, 副教授, 博士研究生, 主要从事控制理论的研究
论文联系人: 刘碧玉, 女, 博士研究生; 电话: 0731-8830080(O); E-mail: biyuliu@hotmail.com

