非高斯噪声下的车载GPS信号定位算法
陈宇波,宋迎春
(中南大学 信息物理工程学院,湖南 长沙,410083)
摘 要:针对车载GPS定位算法中卡尔曼滤波对异常的观测噪声非常敏感,严重影响车载GPS定位的精度问题,应用Bayes定理,给出观测噪声服从污染正态分布的Bayes滤波算法。研究结果表明:该滤波算法能够有效地抑制异常噪声对车载GPS定位算法的影响;实例解算结果验证了该算法的有效性和可靠性。
关键词:卡尔曼滤波;非高斯噪声;Bayes估计;车载GPS定位
中图分类号:TP301.6 文献标志码:A 文章编号:1672-7207(2010)04-1462-05
A Bayes filter algorithm with non-Gaussian noises based on
location of vehicular GPS
CHEN Yu-bo, SONG Ying-chun
(School of Info-Physics and Geomatics Engineering, Central South University, Changsha 410083, China)
Abstract: Based on the fact that the precision of location of vehicular GPS is significantly affected by the gross errors since Kalman filtering is very sensitive to them, a robust Bayesian estimator for the state parameters of one kind of dynamic models was given based on Bayesian theory with non-Gaussian noises. The results show that this Bayes filter algorithm can resist efficiently affection of abnormal noises. Example proves that the modified Kalman filter is effective and reliable.
Key words: Kalman filtering; non-Gaussian noises; Bayes estimation; location of vehicular GPS
在车载GPS动态定位中,由于受多路径效应、大气扰动等影响,周跳可能频频发生。此外,车载GPS途径高大建筑或树木时,其信号受阻断。在某一历元,可能有1颗卫星发生周跳,也可能几颗卫星同时发生周跳(简称多周跳现象)。动态滤波系统自身无法消除这些粗差(周跳)的影响。目前,关于粗差的有效辨识和剔除,人们在理论上和实际工程中均建立了一些具有针对性的实用方法,如抗差Kalman滤波法[1-3]、自适应滤波法[4-6]、自适应抗差滤波法[4, 7-8]、以拟准检定法检测观测方程中的粗差[9]、针对粗差的自适应Kalman滤波法[10]以及粗差探测修复法[11]。实践结果表明:这些方法各有其特点和相应的应用场合,但都未考虑或利用未知参数的先验信息。为此,本文作者应用Bayes定理,给出观测噪声服从污染正态分布的Bayes滤波算法,以便有效地抑制异常噪声对车载GPS定位算法的影响。
1 标准卡尔曼滤波
利用卡尔曼滤波处理动态定位数据的滤波模型可概括为:
 ,
, (1)
(1)
其中:xk为状态向量;zk为观测向量; 为状态转移矩阵;Hk为观测系数矩阵;状态噪声wk、量测噪声vk、系统的初始状态x0均服从于正态分布且相互独立,相应的卡尔曼滤波公式为:
为状态转移矩阵;Hk为观测系数矩阵;状态噪声wk、量测噪声vk、系统的初始状态x0均服从于正态分布且相互独立,相应的卡尔曼滤波公式为:





其中: ;
; ;
; ;
; ;
; 。
。
但是,只有当系统的状态方程和量测方程的所有变量都服从于正态分布,并且式(1)的函数关系为线性关系时,由卡尔曼滤波公式所获得的估计量是有效的、无偏的,并且是最小方差估计。为了论述方便,引入记号 表示均值为
表示均值为 、方差为P的多维正态分布,即
、方差为P的多维正态分布,即

 (2)
(2)
引理[12] 设 是观测误差的高斯密度分布函数,
是观测误差的高斯密度分布函数, 是状态预测的先验高斯密度分布函数,则:
是状态预测的先验高斯密度分布函数,则:

 (3)
(3)
其中: ,
,  。
。
2 非高斯噪声下的Bayes滤波算法
在式(1)表示的量测方程中,若vk是非高斯噪声,则可以用一加权正态分布来逐次逼近[13-15],即
 (4)
(4)
根据动态线性模型的理论知识,由式(4)可知给定xk时,zk的先验条件分布密度为:
 (5)
(5)
设给定 时,xk的先验条件分布密度
时,xk的先验条件分布密度 以及给定时zk的预报条件密度函数
以及给定时zk的预报条件密度函数 两阶可导, 则滤波公式为:
两阶可导, 则滤波公式为:
 (6)
(6)
 (7)
(7)
(8)
 (9)
(9)
其中: 为代价函数,是1个列向量,其向量元素为
为代价函数,是1个列向量,其向量元素为
 (10)
(10)
 为矩阵,其矩阵元素为:
为矩阵,其矩阵元素为:
 (11)
(11)
可以看出:为代价函数的导数。
在上述滤波算法中,关键是要计算预测的概率密度。下面首先计算给定时xk的先验条件分布密度 。由式(5),通过引理可以得到:
。由式(5),通过引理可以得到:

 (12)
(12)
其中: ;i=1, 2。记
;i=1, 2。记 ,
, ,考虑到
,考虑到 ,有
,有 。式(5)和(12)都是在没有得到第k时刻测量值zk时得到的,即得到的是所谓的预报方程或时间修正方程。利用式(10)~(12)可以求得:
。式(5)和(12)都是在没有得到第k时刻测量值zk时得到的,即得到的是所谓的预报方程或时间修正方程。利用式(10)~(12)可以求得:


其中:
 ;
;


 ;
;
 ;
;
 ;
;
i=1, 2; 和
和 (
( )分别为Zk来自于正常量测(如
)分别为Zk来自于正常量测(如 )和粗差量测(如
)和粗差量测(如 )的后验概率。
)的后验概率。
3 实例计算分析
为了验证Bayes滤波算法在实际解算中的效果,采用一组机载GPS动态实测数据,并采用2台Trimble-4000SSE型接收机:一台固定于参考站,另一台安置于飞机上。经过10 min初始化,飞机起飞,整个飞行时间约为90 min。为了分析和比较多种Kalman滤波结果中飞机非平稳扰动时对状态估计的影响,用高精度的载波相位双差解作为参考值,而用C/A码和双差P码进行各种滤波解算,将计算结果与参考值进行比较。为了检验抗差估计的效果,每隔500历元(其中,历元为时间单位)给2号卫星人为加入30 m定位粗差。滤波模型采用常速度模型,其位置、速度、C/A和P2码的初始方差分别取0.2 m2,9×10-6 m2/s2,1 m2和1 m2,速度的谱密度取0.01 m2/s3。状态模型方差-协方差阵直接采用文献[7]中的模型。
因为本文研究的重点是非高斯噪声的情形,因而只选择了一段数据较平稳(机动幅度小)的数据段:从第4 000历元到6 000历元。观测值为3个轴上的位移采样,由于不知道污染率和污染分布的相关参数,假设污染率 ,
, ,设观测值噪声vk污染正态分布为:
,设观测值噪声vk污染正态分布为:
其中: ;
; 。
。
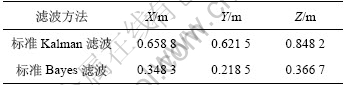
图1~6所示为利用Matalb编程解算的结果。2种滤波方法的均方误差(RMS)比较结果见表1。
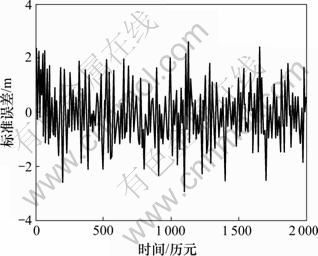
图1 标准卡尔曼滤波X方向的标准误差
Fig.1 Standard error of Kalman filtering in X direction
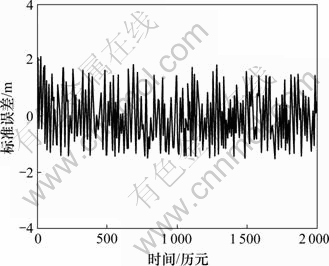
图2 Bayes曼滤波X方向的标准误差
Fig.2 Standard error of Bayes filtering in X direction
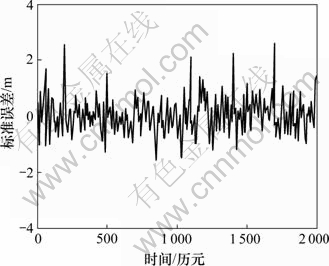
图3 标准卡尔曼滤波Y方向的标准误差
Fig.3 Standard error of Kalman filtering in Y direction

图4 Bayes曼滤波Y方向的标准误差
Fig.4 Standard error of Bayes filtering in Y direction
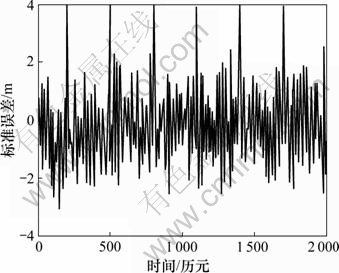
图5 标准卡尔曼滤波Z方向的标准误差
Fig.5 Standard error of Kalman filtering in Z direction

图6 Bayes曼滤波Z方向的标准误差
Fig.6 Standard error of Bayes filtering in Z direction
表1 2种滤波方法的均方误差(RMS)比较
Table 1 RMS comparison of two filtering methods
从图1、图3和图5可以看出:在X, Y和Z方向,由于测量噪声异常而利用标准Kalman滤波来进行定位解算,有较大的偏差,特别是Z方向的偏差更加 明显。
比较图1和图2,图3和图4以及图5和图6可以发现:当把测量噪声看作是带有污染正态分布的测量噪声时,利用本文提供的Bayes滤波,可以很好地改善滤波结果,一些大的偏差已经被修正。
从表1可以看出:本文提供的Bayes滤波从整体上优于标准Kalman滤波;相对于其他的自适应卡尔曼滤波,Bayes滤波不需要确定合适的抗差因子和权因子。
4 结论
(1) Kalman滤波算法要求测量噪声是高斯噪声,而车载GPS动态定位观测噪声通常是非高斯噪声,它严重降低车载GPS动态定位的精度。
(2) 当观测噪声是非高斯噪声时,车载GPS动态定位利用本文提供的Bayes滤波算法,可以有效抵制车载观测噪声异常的影响,从而得到更高的定位精度。
(3) 本文给出的状态估计与污染率和粗差的协方差阵之间的关系对于抗差估计的研究有一定的理论 意义。
参考文献:
[1] 杨元喜. 动态系统的抗差Kalman滤波[J]. 郑州测绘学院学报, 1997, 14(2): 79-84.
YANG Yuan-xi. Robust Kalman filtering for dynamic system[J]. Journal of Zhengzhou Institute of Surveying and Mapping, 1997, 14(2): 79-84.
[2] 周江文. 抗差最小二乘法[M]. 武汉: 华中理工大学出版社, 1997: 30-50.
ZHOU Jiang-wen. Robust least squares method[M]. Wuhan: Press of Huazhong University of Science and Technology, 1997: 30-50.
[3] Koch K R, Yang Y. Robust Kalman filter for rank deficient observation model[J]. Journal of Geodesy, 1998, 72(8): 436-441.
[4] Yang Y, He H, Xu G. Adaptively robust filtering for Kinematic geodetic positioning[J]. Journal of Geodesy, 2001, 75(2/3): 109-116.
[5] 杨元喜, 张双成. 导航解算中的系统误差及其协方差矩阵拟合[J]. 测绘学报, 2004, 33(3): 189-194.
YANG Yuan-xi, ZHANG Shuang-cheng. Fittings of systematic errors and covariance matrices in navigation[J]. Acta Geodaetica et Cartographica Sinica, 2004, 33(3): 189-194.
[6] 杨元喜. 动态定位自适应滤波解的性质[J]. 测绘学报, 2003, 32(3): 189-192.
YANG Yuan-xi. Properties of the adaptive filtering for Kinematic positioning[J]. Acta Geodaetica et Cartographica Sinica, 2003, 32(3): 189-192.
[7] 杨元喜, 何海波, 徐天河. 论动态自适应滤波[J]. 测绘学报, 2001, 30(4): 293-298.
YANG Yuan-xi, HE Hai-bo, XU Tian-he. Adaptive robust filtering for Kinematic GPS positioning[J]. Acta Geodaetica et Cartographica Sinica, 2001, 30(4): 293-298.
[8] YANG Yuan-xi, XU Tian-he, HE Hai-bo. On adaptively Kinematic filtering[C]//English Edition of Acta Geodetica et Cartographica Sinica. Beijing: Surveying and Mapping Press, 2001.
[9] 欧吉坤, 柴艳菊, 袁运斌. 自适应选权滤波[C]//大地测量与地球动力学进展. 武汉: 科学技术出版社, 2004: 816-823.
Ou Ji-kun, CHAI Yan-ju, YUAN Yun-bin. Adaptive filtering for kinematic positioning by selection of the parameter weights[C]// Progress in Geodesy and Geodynamics. Wuhan: Science & Technology Press, 2004: 816-823.
[10] 王国富, 朱建军. 含有粗差观测值的自适应滤波[J]. 测绘通报, 2004(4): 19-21.
WANG Guo-fu, ZHU Jian-jun. Adaptive filtering under the observation contaminated the gross error[J]. Bulletin of Surveying and Mapping, 2004(4): 19-21.
[11] 宋迎春, 朱建军, 陈正阳. 动态定位解算中测量粗差的探测与修复[J]. 测绘科学, 2003, 31(5): 39-41.
SONG Ying-chun, ZHU Jian-jun, CHEN Zheng-yang. The detection and correction of gross error in observed value for Kalman filter[J]. Science of Surveying and Mapping, 2003, 31(5): 39-41.
[12] Fruhwirth R. Track fitting with non-Gaussian noise[J]. Computer Physics Communication, 1997, 100: 1-16.
[13] 田铮, 肖华勇. 一类动态模型状态参数的稳健贝叶斯估计[J]. 数理统计与应用概率, 1995, 10(3): 35-42.
TIAN Zheng, XIAO Hua-yong. Robust Bayesian for the parameters of one kind of dynamic models[J]. Mathematical Statistics and Applied Probability, 1995, 10(3): 35-42.
[14] 孙志东, 孙增圻. 一种对成片野值不敏感的鲁棒卡尔曼滤波[J]. 清华大学学报: 自然科学版, 1994, 34(1): 55-61.
DENG Zhi-dong, SUN Zeng-qi. Robust Kalman filtering insensitive to continuous outlier[J]. Journal of Tsinghua University: Science and Technology, 1994, 34(1): 55-61.
[15] 王志军, 朱建军. 污染模型下的最优估计[J]. 测绘学报, 1999, 28(1): 51-56.
WANG Zhi-jun, ZHU Jian-jun. Optimal estimation under contaminated error model[J]. Acta Geodaetica et Cartographica Sinica, 1999, 28(1): 51-56.
收稿日期:2009-11-27;修回日期:2010-04-29
基金项目:国家自然科学基金资助项目(40874005);国家教育部博士点基金资助项目(200805331086);国家教育部博士后基金资助项目(20090451489)
通信作者:陈宇波(1966-),男,湖南宁乡人,博士,从事车载GPS定位信息处理与研究;电话:15308408228;E-mail: cyb@transfar.com
(编辑 陈灿华)

