动臂变幅工况下旋挖钻机工作装置的动力学特性
何清华1,康辉梅1,朱建新1,许怡赦2
(1. 中南大学 机电工程学院,湖南 长沙,410083;
2. 湖南机电职业技术学院 电气工程系,湖南 长沙,410151)
摘要:为研究和提高旋挖钻机工作装置的力学性能,对动臂变幅工况下工作装置的动力学特性进行分析。基于动静法建立动力学模型,在Simulink仿真平台上构建基于MATLAB函数的仿真模型并进行仿真分析。研究结果表明: 动臂变幅时,无论动力头和钻杆处于钻桅的什么位置,对动臂变幅液压缸提供的主动力都没有影响;当钻桅倾角为0°时,动臂变幅液压缸提供的主动力的变化最小,当钻桅倾角为95°时,动臂变幅液压缸提供的主动力的变化最大。
关键词:旋挖钻机;动力学特性;仿真
中图分类号:TU67;O313 文献标志码:A 文章编号:1672-7207(2012)06-2150-07
Dynamic mechanical properties of working device of rotary drilling rig under lift-arm luffing conditions
HE Qing-hua1, KANG Hui-mei1, ZHU Jian-xin1, XU Yi-she2
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. Department of Electrical Engineering, Hunan Polytechnic College of Mechanical and Electrical, Changsha 410151, China)
Abstract: In order to research and improve the mechanical behavior of working device of rotary drilling rig under lift-arm luffing conditions, the analysis of dynamic mechanical properties of working device was carried out. A dynamic mechanical model was established, and a simulation model based on MATLAB was built up and simulated in Simulink. The results show that the active force provided by lift-arm hydraulic cylinder has no relation to the relative position of the driver to the mast, nor the drilling pipe to the mast. During the process of the lift-arm luffing, the difference in the active force provided by lift-arm hydraulic cylinder touches the bottom when the angle of mast is 0°, and it comes to a head when the angle of mast is 95°.
Key words: rotary drilling rig; dynamic mechanical properties; simulation
旋挖钻机是以利用回转斗、短螺旋钻头或其他作业装置进行干、湿钻进、逐次取土、反复循环作业成孔为基本功能的机械设备。该钻机也可配置长螺旋钻具、套管及其驱动装置、地下连续墙抓斗、预制桩桩锤等作业装置[1],具有效率高、污染少、功能多等突出优点。随着三峡水电站、青藏铁路、奥运工程、城市地铁轻轨等大规模基础工程建设的启动,近年来这种设备在我国得到了广泛应用和发展。旋挖钻机在工作过程中需承受复杂多变的阻力和阻力矩。谢嵩 岳[2]对变幅机构进行了变幅工况下运动学和动力学的理论分析,建立了变幅机构的虚拟样机,利用虚拟样机对其进行了动力学仿真研究和优化设计。黎中银等[3]对钻进工况下的工作装置进行了静力学分析和有限元分析。何晓艳等[4-9]进行了三角架、动臂和钻桅的静力学分析和有限元分析。以上对旋挖钻机工作装置的研究主要集中在某些单一构件的静力学分析和强度分析上。旋挖钻机工作装置在变幅过程中,不仅承受静载荷的作用,而且承受各种动载荷的作用。通过建立数学模型和仿真模型进行动力学特性分析,可以研究和改善旋挖钻机的力学性能。为此,本文作者建立动臂变幅工况下旋挖钻机工作装置的动力学模型,在Simulink仿真平台上构建基于MATLAB函数的仿真模型并进行仿真,进而研究其动力学特性。
1 旋挖钻机的结构及工作原理
旋挖钻机的结构如图1所示。旋挖钻机就位后,先通过变幅机构对钻桅姿态和钻孔作业半径进行调整对孔,即可开始钻孔作业。在钻孔作业过程中,主卷扬浮动,动力头液压马达经减速机减速及大、小齿轮减速后带动钻杆旋转,同时加压液压缸经动力头向钻杆提供垂直向下的加压力,实现钻进作业。待钻具内钻渣容量达到规定后,动力头的驱动马达停止运转,主卷扬回转,提升钻具至地面;转台回转至地面卸渣位置卸渣;转台回位至钻孔位置,主卷扬回转,下放钻具至孔底,开始下一个循环作业。
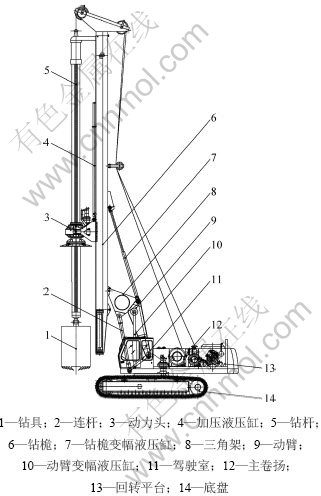
图1 旋挖钻机整体结构
Fig.1 Structure of rotary drilling rig
2 数学模型的建立
各刚体受力分析图见图2。设定动臂变幅时,钻桅变幅液压缸保持任意位置不动作,即图2(c)中的角度ξ1不变,这里称角度ξ1为钻桅倾角。本文以湖南山河智能机械股份有限公司研制的SWDM-22型旋挖钻机为研究对象,其变幅机构采用主流的平行四边形加小三角形结构,连杆、三角架、动臂和回转平台构成的四边形ABCD(图2)为平行四边形,三角架及安装在其上的钻桅、动力头、钻杆等均作平动,其角速度和角加速度均为0,每一瞬时各质点的加速度相同;连杆与水平面的夹角、角速度和角加速度分别和动臂与水平面的夹角、角速度和角加速度相同,设动臂与水平面的夹角为β,角速度为ω1,角加速度为ε1。这里称角度β为动臂转角。
建立如图2(a)所示左手直角坐标系,则连杆质心C2的坐标为:

 (1)
(1)
式中: 为连杆质心C2至铰点A的距离。
为连杆质心C2至铰点A的距离。
将式(1)对时间取二次导数,即可求得连杆质心C2的加速度的2个分量:
 (2)
(2)
三角架、钻桅、动力头和钻杆的质心的加速度与B点的加速度相同:
 (3)
(3)
式中:r2为铰点A与铰点B间的距离。
动臂质心加速度为:
 (4)
(4)
式中: 为动臂质心C4至铰点D的距离。拆分变幅机构的各个刚体,应用达朗伯原理给每个刚体加上相应的惯性力系,分别进行动力学受力分析(图2),并列写出每个刚体的平衡方程。
为动臂质心C4至铰点D的距离。拆分变幅机构的各个刚体,应用达朗伯原理给每个刚体加上相应的惯性力系,分别进行动力学受力分析(图2),并列写出每个刚体的平衡方程。
连杆绕通过A点的定轴转动,惯性力系简化为通过A点的力 和
和 以及力偶Mg2,方向如图2(a)
以及力偶Mg2,方向如图2(a)
所示,大小分别为: ;
; ;
;
 。式中:和为惯性力;I2A为连杆绕通过A点的定轴的转动惯量。根据达朗伯原理,作用于质点系的主动力、约束反力和惯性力在形式上组成平衡力系,可列出平衡方程:
。式中:和为惯性力;I2A为连杆绕通过A点的定轴的转动惯量。根据达朗伯原理,作用于质点系的主动力、约束反力和惯性力在形式上组成平衡力系,可列出平衡方程:
 (5)
(5)
式中:XA和YA为铰点A的约束反力;XB和YB为铰点B的约束反力;G2为连杆重力。
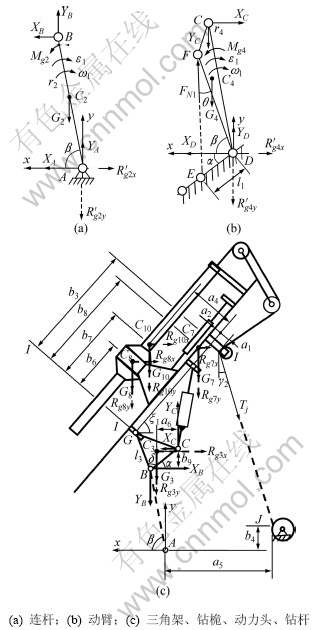
图2 各刚体受力分析图
Fig.2 Mechanical analysis of rigid bodies
动臂绕通过D点的定轴转动,惯性力系简化为通过D点的力 和
和 以及力偶Mg4,方向如图2(b)
以及力偶Mg4,方向如图2(b)
所示,大小分别为: ,
, ,
,
 。式中:I4D为动臂绕通过D点定轴的转动惯量。根据达朗伯原理,可列出平衡方程:
。式中:I4D为动臂绕通过D点定轴的转动惯量。根据达朗伯原理,可列出平衡方程:
 (6)
(6)
式中:XC和YC为铰点C的约束反力;XD和YD为铰点D的约束反力;FN1为动臂变幅液压缸提供的主动力;
 ;角度σ=
;角度σ=
 ;角度
;角度 ;G4为动臂重力;r4为铰点C与铰点D间的距离;l1为铰点D与铰点E间的距离;l4为铰点D与铰点F间的距离。
;G4为动臂重力;r4为铰点C与铰点D间的距离;l1为铰点D与铰点E间的距离;l4为铰点D与铰点F间的距离。
三角架、钻桅、动力头、钻杆作平动,惯性力系简化为通过各刚体质心的力,方向如图2(c) 所示,大小分别为:
 ;
; ;
; ;
; ;
; ;
; ;
; ;
; 。根据达朗伯原理,可列出平衡方程:
。根据达朗伯原理,可列出平衡方程:



 (7)
(7)
式中:Tj为钻桅在任意姿态下主卷扬所受的力;Tj=G10sinξ1;Tjx=Tjsinγ2;Tjy=Tjcosγ2;
 G3为三角架重力;G7为钻桅重力;G8为动力头重力,G10为钻杆重力;b9为铰点C与铰点B的垂直距离,a6为铰点C与三角架质心C3的水平距离;b8和a2分别为钻桅质心C7与铰点G分别沿钻桅方向与钻桅垂直方向的距离;l3为铰点B与铰点G间的距离;b6和a4分别为动力头质心C8与铰点G分别沿钻桅方向与钻桅垂直方向的距离;b7为钻桅质心C10与铰点G沿钻桅方向的距离;b3和a1分别为主卷扬压轮I与铰点G沿钻桅方向与钻桅垂直方向的距离;b4和a5分别为铰点A与主卷扬J间的垂直距离与水平距离。
G3为三角架重力;G7为钻桅重力;G8为动力头重力,G10为钻杆重力;b9为铰点C与铰点B的垂直距离,a6为铰点C与三角架质心C3的水平距离;b8和a2分别为钻桅质心C7与铰点G分别沿钻桅方向与钻桅垂直方向的距离;l3为铰点B与铰点G间的距离;b6和a4分别为动力头质心C8与铰点G分别沿钻桅方向与钻桅垂直方向的距离;b7为钻桅质心C10与铰点G沿钻桅方向的距离;b3和a1分别为主卷扬压轮I与铰点G沿钻桅方向与钻桅垂直方向的距离;b4和a5分别为铰点A与主卷扬J间的垂直距离与水平距离。
联合式(1)~(6),即可求得主动力和各约束反力。若只需求得各主动力间的平衡关系,则可通过建立动力学普遍方程或拉格朗日方程获得。本文通过建立拉格朗日方程来求取主动力FN1和其他主动力之间的 关系。
动臂变幅工况下工作装置具有1个自由度,选动臂转角β作广义坐标,系统的动能为:

由此可得:



已选取动臂转角β为系统的广义坐标,则对应的广义虚位移为δβ,以下求取广义力Qβ。各主动力在广义虚位移δβ中所做虚功之和为:
由此可求得广义力:
将以上结果代入拉格朗日方程得:



从而可求得主动力FN1和其他主动力之间的关系为:


 (8)
(8)
以上计算是在将旋挖钻机的受力向纵平面简化处理的基础上进行的。在旋挖钻机的实际结构中,动臂变幅液压缸、连杆和钻桅变幅液压缸各为2个,相对纵平面对称分布。其中,左、右动臂变幅液压缸和左、右连杆均与纵平面平行,单个动臂变幅液压缸提供的主动力及单根连杆的约束反力分别为上述计算结果的一半,即左动臂变幅液压缸提供的主动力为:
 (9)
(9)
3 仿真模型的建立及力学特性分析
前面通过分析各刚体质心加速度获得6个方程,对每个刚体采用动静法推导出9个动力学方程,共计15个方程。动臂变幅机构共有15个未知数,这15个方程一起构成了一组齐次线性代数方程组,用矩阵形式表示如下:
AX=B
其中:X=[FN1,aC2x,aC2y,aBx,aBy,aC4x,aC4y,XA,YA,XB,YB,XC,YC,XD,YD]T;A为由X的系数构成的15阶矩阵,B为由各方程已知项构成的列向量。可通过下式求得列向量X:
X=A-1B
A是1个15阶矩阵,而且使用Simulink建立动态仿真[10-12]后,每一帧仿真都需要对X进行1次求解,所以,利用MATLAB强大的数值计算功能[13],编写MATLAB函数求解X。在Simulink平台建立的基于MATLAB函数的动力学仿真模型如图3所示。由钻桅倾角ξ1、外部输入的动臂角加速度及对其分别进行1次积分和2次积分得到的角速度和角度共4项一起构成MATLAB函数的输入,其他的机构参数在MATLAB函数内部定义。MATLAB函数的输出包括2部分:第1部分是动臂变幅液压缸提供的主动力和各点的约束反力,第2部分是确保公式推导正确无误以及积分过程具有足够精度的相容性校核结果。

图3 基于MATLAB函数的Simulink仿真模型
Fig.3 Simulation model based on Matlab function in Simulink
在动臂变幅过程中,动臂转角β从0?变化至76?,动臂角加速度ε1的设置如图4所示;钻桅倾角ξ1的变化范围为[0?,95?],步长设为5?。在动臂变幅过程中,不同钻桅姿态下左动臂变幅液压缸提供的主动力如图5所示,左动臂变幅液压缸提供的主动力变化随钻桅倾角的变化关系如图6所示,铰点D的约束反力和钻桅倾角及动臂转角的变化关系如图7所示。
式(8)表明:动臂变幅液压缸提供的主动力FN1和动臂转角β及钻桅倾角ξ1均有关;FN1只与各外力有关,而与各铰点约束反力无关;由于回转平台、连杆、三角架和动臂等所构成的平行四边形特性,FN1只与钻杆及动力头的重力有关,而与其重心位置无关,因此,在动臂变幅工况下,无论动力头和钻杆处于钻桅的什么位置,FN1不变。
由图5可知:左动臂变幅液压缸提供的主动力 和动臂转角β及钻桅倾角ξ1均为非线性关系;当ξ1为0?时,动臂变幅过程中的最大值最小。对左动臂变幅液压缸提供的主动力在动臂转角变化范围内的变化随钻桅倾角的变化关系(图6)分析可知:随着ξ1不断增大,的变化也不断增大,当ξ1为0?时,的变化最小;当ξ1为95°时,的变化最大。此外,由图5可知:当β为76°,ξ1为95°时,最小;但是,的最大值并不出现在ξ1为0?或95°,而是出现在ξ1为75°附近。
和动臂转角β及钻桅倾角ξ1均为非线性关系;当ξ1为0?时,动臂变幅过程中的最大值最小。对左动臂变幅液压缸提供的主动力在动臂转角变化范围内的变化随钻桅倾角的变化关系(图6)分析可知:随着ξ1不断增大,的变化也不断增大,当ξ1为0?时,的变化最小;当ξ1为95°时,的变化最大。此外,由图5可知:当β为76°,ξ1为95°时,最小;但是,的最大值并不出现在ξ1为0?或95°,而是出现在ξ1为75°附近。

图4 动臂角加速度ξ1
Fig.4 Angular acceleration of lift-arm
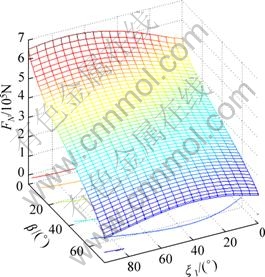
图5 不同钻桅姿态下左动臂变幅液压缸提供的主动力随动臂转角变化关系
Fig.5 Relationship between load of left lift-arm hydraulic cylinder and angle of lift-arm

图6 动臂转角变化范围内左动臂变幅液压缸提供的主动力变化随钻桅倾角变化关系
Fig.6 Relationship between angle of mast and difference in load of left lift-arm hydraulic cylinder during lift-arm luffing process
图7表明:铰点D约束反力FD和动臂转角β及钻桅倾角ξ1均为非线性关系;当 时,随着动臂转角β不断增大,FD先减少,继而逐渐增大;当
时,随着动臂转角β不断增大,FD先减少,继而逐渐增大;当 时,随着β不断增大,FD不断减少;当ξ1为60°,β为70.3°时,FD最小;当ξ1为95°,β为0?时,FD最大。
时,随着β不断增大,FD不断减少;当ξ1为60°,β为70.3°时,FD最小;当ξ1为95°,β为0?时,FD最大。
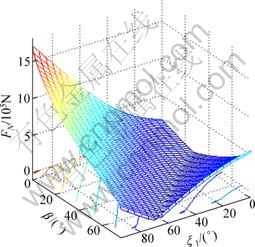
图7 不同钻桅姿态下约束反力FD随动臂转角变化关系
Fig.7 Relationship between restraining force of pin joint D and angle of lift-arm
4 试验结果与仿真结果比较
本试验以湖南山河智能机械股份有限公司研制的SWDM-22型全液压多功能旋挖钻机为试验对象,配置5节摩阻式钻杆,未配置钻具,在钻桅垂直状态下即ξ1=90°时,测定动臂变幅过程中左动臂变幅液压缸有杆腔和无杆腔的压力曲线。已知动臂变幅液压缸缸筒内径和活塞杆直径,则可由有杆腔和无杆腔的压力曲线求出动臂变幅液压缸提供的主动力曲线。仿真和试验所得左动臂变幅液压缸提供的主动力曲线如图8所示。对比图8中的2条曲线可知:两者具有相同的变化趋势,初始点和终点数值基本一致,由此可判断前述数学模型及仿真模型的正确性,说明该力学模型能够较真实地反映旋挖钻机的力学特性。
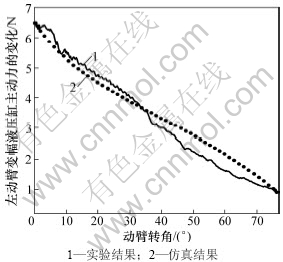
图8 仿真数据和试验结果的对比
Fig.8 Comparison of simulation data with experimental ones
5 结论
(1) 在动臂变幅工况下,动臂变幅液压缸提供的主动力只与钻杆及动力头的重力有关,而与其重心位置无关。因此,在动臂变幅时,不管动力头和钻杆处于钻桅的什么位置,对动臂变幅液压缸提供的主动力都没有影响。
(2) 动臂变幅液压缸提供的主动力和动臂转角及钻桅倾角均为非线性关系,约束反力FD和动臂转角及钻桅倾角也均为非线性关系。
(3) 当钻桅保持水平姿态进行动臂变幅时,动臂变幅液压缸提供的主动力的最大值最小且油压波动也最小;当钻桅倾角为75°时,动臂变幅液压缸提供的主动力的最大值最大。随着钻桅倾角的不断增大,动臂变幅液压缸的油压波动逐渐增大;当钻桅倾角达到最大值95°时,动臂变幅液压缸的油压波动最大。
参考文献:
[1] GB/T 21682―2008, 旋挖钻机[S].
GB/T 21682―2008, Rotary drilling rig[S].
[2] 谢嵩岳. 旋挖钻机变幅机构动力学特性研究及其优化设计[D]. 长沙: 中南大学机电工程学院, 2009: 13-58.
XIE Song-yue. Study on mechanical properties and optimization design of luffing mechanism of rotary drilling rig[D]. Changsha: Central South University. College of Mechanical and Electrical Engineering, 2009: 13-58.
[3] 黎中银, 焦生杰, 吴方晓. 旋挖钻机与施工技术[M]. 北京: 人民交通出版社, 2010: 25-48.
LI Zhong-yin, JIAO Sheng-jie, WU Fang-xiao. Rotary drilling rig and construction technology[M]. Beijing: China Communications Press, 2010: 25-48.
[4] 何晓艳. NR22型旋挖钻机钻挖支撑机构有限元分析[D]. 长春: 吉林大学机械科学与工程学院, 2006: 25-39.
HE Xiao-yan. Finite element analysis on supporting mechanism of NR22 type rotary drilling rig[D]. Changchun: Jilin University. College of Mechanical Science and Engineering, 2006: 25-39.
[5] 杨鹏. X型旋挖钻机的结构分析[D]. 北京: 中国地质大学工程技术学院, 2006: 37-46.
YANG Peng. Structure analysis of type-X rotary drilling rigs[D]. Beijing: China University of Geosciences. College of Engineering and Technology, 2006: 37-46.
[6] 董明鹤. NR220 旋挖钻机桅杆结构分析及焊接工艺性研究[D]. 长春: 吉林大学机械科学与工程学院, 2005: 31-45.
DONG Ming-he. The structure analysis and welding technology research for the mast of NR220 rotary drilling rig[D]. Changchun: Jilin University. College of Mechanical Science and Engineering, 2005: 31-45.
[7] 姚宗敏. NR22型旋挖钻机桅杆有限元分析[D]. 长春: 吉林大学机械科学与工程学院, 2006: 20-46.
YAO Zong-min. The finite element analysis of mast of NR22 rotary drilling rig[D]. Changchun: Jilin University. College of Mechanical Science and Engineering, 2006: 20-46.
[8] 战红. 旋挖钻机立柱的有限元分析及可靠性探讨[D]. 大庆: 大庆石油学院机械学院, 2005: 25-32.
ZHAN Hong. FEA of the leader of the rotating drilling rigs and probe into the reliability[D]. Daqing: Daqing Petroleum Institute. School of Mechanical Engineering, 2005: 25-32.
[9] 王文岳. 旋挖钻机中桅杆及滑轮架失效分析与改进方案探讨[D]. 北京: 中国地质大学工程技术学院, 2008: 21-43.
WANG Wen-yue. Analysis and improvement studying of middle-mast and pulley-yoke failure of rotary drilling rig[D]. Beijing: China University of Geosciences. College of Engineering and Technology, 2008: 21-43.
[10] 约翰・F・加德纳.机构动态仿真―使用MATLAB和Simulink[M].周进雄, 张陵, 译. 西安: 西安交通大学出版社, 2002: 180-196.
Gardner J F. Simulations of Machines: Using MATLAB and SIMULINK[M]. ZHOU Jin-xiong, ZHANG Ling, transl. Xi’an: Xi’an Jiaotong University Press, 2002: 180-196.
[11] ZHANG Ke, WU Yi-xiong, L? Xue-qin, et al. Dynamic modeling and simulation for nonholonomic welding mobile robot[J]. Journal of Central South University of Technology, 2007, 14(5): 679-685.
[12] 杨英杰, 邓会勇, 李侠. 基于MATLAB/Simulink 的粒度分离过程计算机仿真[J]. 中国有色金属学报, 2006, 16(2): 346-350.
YANG Ying-jie, DENG Hui-yong, LI Xia. Simulation of particle separation process based on MATLAB/Simulink[J]. The Chinese Journal of Nonferrous Metals, 2006, 16(2): 346-350.
[13] 张志涌. 精通MATLAB 6.5版教程[M]. 北京: 北京航空航天大学出版社, 2003: 23-45.
ZHANG Zhi-yong. Proficiency in MATLAB, Version 6.5[M]. Beijing: Beijing University of Aeronautics and Astronautics Press, 2003: 23-45.
(编辑 陈灿华)
收稿日期:2011-06-24;修回日期:2011-08-28
基金项目:国家高技术研究发展计划(“863计划”)项目(2002AA001019);湖南省研究生科研创新项目(CX2009B028);中南大学研究生学位论文创新基金资助项目(2009ybfz04)
通信作者:康辉梅(1975-),女,湖南娄底人,博士研究生,从事复杂机械的力学行为研究;电话:0731-88830314;E-mail:plum_007@sina.com

