DOI: 10.11817/j.issn.1672-7207.2018.11.010
核电水池水下焊接ROV线缆稳态力学特性
李战东1,陶建国1,罗阳1,孙浩2,丁亮1,邓宗全1
(1. 哈尔滨工业大学 机电工程学院,黑龙江 哈尔滨,150080;
2. 福州大学 机械工程及自动化学院,福建 福州,350001)
摘要:设计搭载有焊接装置的有缆水下机器人(ROV);建立部分处于空气中、部分处于水下的线缆稳态力学模型;将常微分方程组形式的模型求解问题转化为初始值求解问题,并以ROV和线缆之间连接点的状态值为初始值,通过四阶龙格-库塔算法求解得到ROV运动速度、水深、线缆入水角和线缆长度等因素与线缆的张力、法向剪切力和副法向力矩等稳态力学特性之间的变化规律。研究结果表明:本文所提出的方法可用于评估多种因素对ROV稳态运动的影响,并能够为改进ROV的设计和控制策略提供参考。
关键词:有缆水下机器人;核反应水池;稳态运动;线缆力
中图分类号:TP242.6 文献标志码:A 文章编号:1672-7207(2018)11-2709-07
Steady-state mechanical characteristics of cable for an underwater welding ROV for nuclear reaction pool
LI Zhandong1, TAO Jianguo1, LUO Yang1, SUN Hao2, DING Liang1, DENG Zongquan1
(1. School of Mechanics Engineering, Harbin Institute of Technology, Harbin 150080, China;
2. School of Mechanical Engineering and Automation, Fuzhou University, Fuzhou 3500001, China)
Abstract: Remotely operated vehicle (ROV) with a weld device was designed. A steady-state theoretical model of a cable partially in reaction pool water and partially in air was constructed. The problem of solving an ordinary differential equation (ODE) set was considered as the problem of solving the initial value problem based on the state value of connection point between the vehicle and cable. The change rules between various factors (i.e., velocity, water depth, entry water angle, water density and cable length) and the steady-state mechanical characteristic (i.e. tension, normal shear force and bi-normal moment) was obtained by the fourth order Runge-Kutta method. The results show that the proposed method can be used to evaluate the effect of various factors on ROV steady-state motion, and provide reference for the improvement of the design and control strategy of ROV.
Key words: remotely operated vehicle (ROV); nuclear reaction pool; steady-state motion; cable force
自2011年福岛核事故发生以来,核安全已成为全球瞩目的问题[1-3]。核电水池作为核电厂的核心部分,更是发生核灾害时救援的重点区域。作为一种无人操作方法,水下机器人广泛应用于海洋勘探[4]、海底地貌绘制[5]、深海采矿[6]和海底观测[7]等方面。然而,目前关于水下焊接机器人应用于核电水池的研究较少,主要是由于实验环境较危险,研发周期较长。数值仿真模拟方法不仅可以提高设计效率和机械性能,而且能够缩短有缆水下机器人(ROV)研发的周期。ROV在核电水池中焊接作业时,需要有尾端线缆为本体系统和焊接装置供电,由于线缆直径较大,与ROV之间的作用力会对ROV的运动和作业的精确性和稳定性产生较大影响,因此,有必要对这类线缆的力学特性展开研究。此前,人们已提出了多个线缆力学模型。WALTON 等[8]通过集中质量法建立了悬挂链的动力学方程;ABLOW等[9]通过有限差分法提出了水下线缆的动力学方程;MILINAZZO等[10]提出了基于Ablow理论的线缆力学模型改进算法,并证明该算法可以有效提高计算效率;CHIOU等[11]提出了一种直接算法,将局部坐标系下的线缆微元控制方程求解问题转化为两点边值问题,再通过牛顿-拉夫逊迭代法进行求解。然而,以上研究集中于线缆的动态力学特性分析,并没有对线缆的稳态力学特性进行分析。由于水下焊接ROV经常处于稳定工作状态(焊接或巡查),因此,应该研究其稳态下的线缆力学问题。DE ZOYSA[12]建立了拖缆水下线缆的三维平衡方程;FRISWELL[13]通过打靶法求解了文献[12]中提出的线缆稳态方程;LEECH等[14]提出了一种水下线缆的力学模型,通过分析实现了二维稳态下的线缆空间形状和张力分布的研究;王飞等[15-16]将稳态动力学方程求解问题转化成两点边值问题,并通过二分法实现求解。虽然这些研究解决了某些类型ROV在稳态运动时的线缆力学问题,但这些ROV大多应用于海洋环境(开阔水域),空气中的线缆长度与水中的线缆长度之间的比例较小,且线缆长细比较大。此外,在同一海域同一深度下环境参数(例如海水密度、温度等)几乎不变,因此,介质变化对线缆稳态力学性能的影响被忽略,在线缆稳态力学模型中也未考虑大的长细比引起的弯矩和剪切力,同时,也需要研究环境因素对线缆稳态力学性能的影响。在设计水下焊接ROV过程中,本文作者采用数值模拟方法,预测和计算机器人尾端线缆的稳态力学特性;首先,对于部分置于空气中和部分置于水中的线缆,建立常微分方程组形式的稳态力学模型;其次,将求解常微分方程组问题转化为初始值问题,并以机器人和线缆之间连接点的状态值为方程组的初始值,通过四阶的龙格-库塔算法实现求解;最后,通过该方法分析多种因素(机器人速度、水深、入水角度和线缆长度)对线缆稳态力学特性的影响。
1 ROV与线缆装置简介
本文作者设计了一款框架式ROV,用于在应急状态下的核电水池的焊接修复和日常状态下的水下巡查。ROV机体结构参数如表1所示。
表1 ROV结构参数
Table 1 Structure parameters of ROV

ROV系统由机器人本体、2个控制舱、8个推进器、尾端线缆和绞盘车等组成。为了使结构紧凑,焊接作业装置置于机体内部。线缆不仅承担传输信号的任务,而且要为机体和作业装置供电,因此,线缆直径与长度之间的比即长径比远大于海洋ROV拖缆的长径比。线缆由外护套、铠装、内护套、铝护套、绝缘层和布线组成[17],布放和收回由绞盘车完成。
2 线缆力学模型
图1所示为线缆力学模型中固定坐标系和局部坐标系示意图(其中h为池水高度)。为了保证核电站的安全生产,在垂直方向上水池水面与池岸之间存在安全距离。因此,线缆被分2个部分即水面以下部分l1和水面以上部分l2。线缆与水面之间的交点P被称为入水点,入水点处的线缆切线与水面的夹角被称为入水角 。将坐标系Oxyz原点固定在水面上,在线缆上建立局部坐标系b-t-n,其中t轴为切向的方向,n为法线方向,根据右手定则可知b为副法向方向。
。将坐标系Oxyz原点固定在水面上,在线缆上建立局部坐标系b-t-n,其中t轴为切向的方向,n为法线方向,根据右手定则可知b为副法向方向。
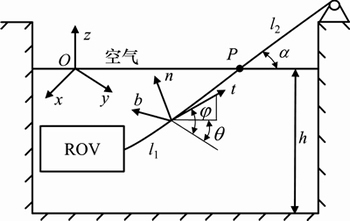
图1 固定坐标系和局部坐标系示意图
Fig. 1 Diagram of the fixed coordinate system and local coordinate system
线缆的姿态由欧拉角θ和φ表示,其中线缆切向在xOy面的投影与y轴之间的夹角θ被称为方位角,切线与xOy面的夹角φ被称为抬升角,ROV与线缆连接点被称为线缆下端点,绞盘车与线缆连接点被称为线缆上端点。
由于线缆l1与l2所处介质不同,要分别建立不同的稳态力学模型,但是二者建模方法相似。下面以线缆l1为例,说明线缆稳态力学模型的建立方法。与海洋中的缆线相比,核电水池中的线缆长细比更大,不仅受到浮力、重力、周围流体的阻力、张力和法向剪切力作用,还会受到弯曲力矩作用。线缆受力模型如图2所示。
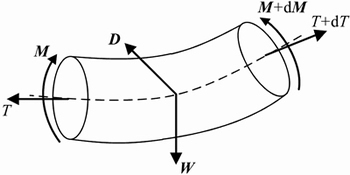
图2 线缆受力模型
Fig. 2 Force model of a cable
稳态下的线缆平衡方程可以表示为
 (1)
(1)
式中: 为线缆力向量F对空间弧长s的微分,F=(T, Sb, Sn) (其中T为线缆的张力,Sb为副法向方向剪切力,Sn为法线方向剪切力);G为线缆重力向量;B为浮力向量;D0为线缆受到流体阻力向量。
为线缆力向量F对空间弧长s的微分,F=(T, Sb, Sn) (其中T为线缆的张力,Sb为副法向方向剪切力,Sn为法线方向剪切力);G为线缆重力向量;B为浮力向量;D0为线缆受到流体阻力向量。
线缆重力与浮力的合力被称为恢复力向量W,其表达式为
 (2)
(2)
在局部坐标系下,流体阻力向量D可以表示为
 (3)
(3)
式中:ut,ub和un分别为线缆切向、副法向和法向速度;Ct,Cb和Cn分别为线缆的切向系数、副法向系数和法向系数;d为线缆的直径;ρ为流体密度;ε为线缆的应变,ε与张力之间的关系可表示为ε=T/(EA) (其中E为线缆的弹性模量,A为线缆截面面积)。
在局部坐标系下,线缆力F关于空间的微分表达式为
 (4)
(4)
式中:向量Ω为在局部坐标系下线缆s处的曲率。曲率与方位角之间的关系如下:
 (5)
(5)
式中:Ωb和Ωn分别为副法向曲率和法向曲率。
将式(2),(3)和(4)代入式(1),分别得到在局部坐标系下方向t,b和n的控制方程:
 (6)
(6)
式中:g为重力加速度。
根据线缆微元段的力矩平衡方程,略去高阶无穷小部分,最终可以得到
 (7)
(7)
式中:Mb为副法向力矩;Mn为法向力矩;I为线缆微元段的惯性矩。
根据局部坐标系与固定坐标系之间的变换关系,可得到
 (8)
(8)
式中:x,y和z分别为线缆微元在固定坐标系下的坐标值。
水面以上部分缆线的稳态数学模型与水面以下部分缆线建模方法相似,不同之处在于所处介质的密度不同。
式(5)~(8)组成了缆线稳态控制方程组,待求解未知数为T,Sb,Sn,Mb,Mn,x,y,z,θ和φ。但仅仅依靠方程组本身,不足以完成求解工作,需要添加初始条件,即给定线缆端点或者是某一位置的状态值,将常微分方程组的求解问题转化为初始值问题。因此,求解线缆端点或者某一位置状态值成为解决问题的关键。对于水下部分线缆,由于其始终与ROV相连,通过ROV运动求解连接点状态值即可得到线缆稳态下的初始值。通过固定坐标系与局部坐标系之间变换,可以得到线缆在下端点处的初始值:
 (9)
(9)
式中:Fx,Fy和Fz分别为作用在ROV上外力,可以通过CFD仿真计算求得[18-22]。T0,Sb0和Sn0分别为张力、副法向力和法向力的初始值。方向角初始值θ0等于ROV运动方向与y轴之间夹角,抬升角初始值φ0始终等于缆线入水角。线缆与ROV之间通过铰链连接,因此,副法向力矩初始值Mb0=0 N・m,法向力矩初始值Mn0=0 N・m。
l2段线缆通过入水点P与l1段线缆连接,它们相互耦合,即点P是l1的上端点,又是l2的下端点。通过计算可以获得点P的状态值,然后,将该状态值视为l2段线缆控制方程组的初始值。
3 线缆力学分析
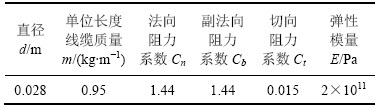
一般作业任务都是在ROV稳态下完成,线缆张力T、法向切线力Sn和副法向力矩Mb是考察线缆稳态运动特性的重要指标,它们与ROV的运动速度、池水深度、线缆入水角和缆线长度等因素有着密切关系。ROV沿y轴直线运动,因此,方向角θ0设定为0°。设绞盘车在岸上的位置 。线缆的物理参数如表2所示。
。线缆的物理参数如表2所示。
表2 线缆物理参数
Table 2 Physical parameters of cable
3.1 速度对线缆力学特性的影响
通过CFD可以计算出匀速运动时ROV所受的阻力,连接点的状态值可由式(9)计算得到。本文ROV运动速度分别设定为0.1,0.2,0.3和0.4 m/s(沿y轴方向)。其他条件如下:池水高度为20 m,入水角为30°,线缆长度为30 m。通过计算可以得到不同速度下的线缆张力T,法向剪切力Sn和副法向力矩Mb,运动速度对线缆稳态力学特性(即张力、法向剪切力、副法向力矩)的影响如图3所示。
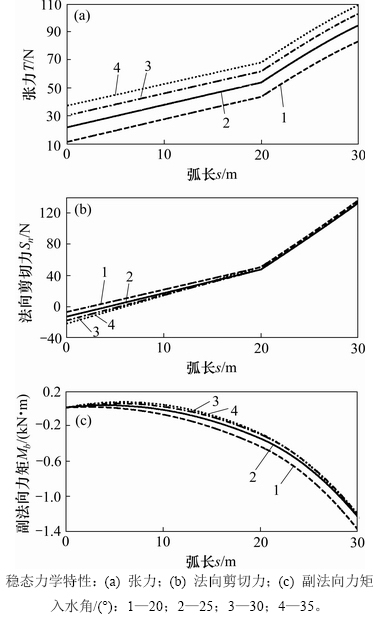
图3 运动速度对线缆稳态力学特性影响
Fig. 3 Influence of velocity on steady-state mechanical characteristics of cable
由图3(a)可知:随着ROV速度增加,线缆上同一位置上的张力T明显增加,同一速度下水中部分或是空气中线缆弧长与张力呈线性关系。由图3(b)可见:虽然剪切力Sn的初始值随着ROV速度增加而减小,但上端点剪切力几乎不受速度影响。从图3(c)可以看出:线缆弧长与副法向力矩Mb之间存在曲线关系,弧长增加,Mb减小,入水点处的曲率无变化。
3.2 水深对线缆力学特性的影响
随着核燃料棒在池中冷却,水温升高,水的蒸发速度加快,进而使池水深度下降,最终导致l1减小,l2增加。当ROV的运动速度v=0.2 m/s,池水高度分别设为16,18,20和21 m时,线缆稳态力学特性计算结果如图4所示。

图4 池水高度对线缆稳态力学特性影响
Fig. 4 Influence of water depth on steady-state mechanical characteristics of cable
从图4(a)可以看出:随着池水高度下降,上端点张力T随之增加,始终处于水中的线缆各点张力无影响。从图4(b)可以看出:随着池水高度下降,处于空气中缆线各点法向剪切力Sn明显增加,Sn变化趋势与张力变化趋势相似。从图4(c)可知:线缆弧长与副法向力矩Mb之间呈曲线关系,池水高度越小,上端点的副法向力矩越大。
3.3 线缆入水角对线缆力学特性的影响
入水角变化将改变ROV在池中位置,导致l1和l2的长度变化和入水点位置变化。当入水角分别设为20°,25°,30°和35°,ROV的速度为0.2 m/s,池水高度为20 m时,入水角对线缆稳态力学性能的影响如图5所示。

图5 入水角对线缆稳态力学特性影响
Fig. 5 Influence of water entry angle on steady-state mechanical characteristics of cable
从图5(a)可以看出:随着入水角度增加,上端点的张力T明显增加,l1部分和l2部分的弧长与张力呈线性变化。从图5(b)可见:当入水角度从20°变化到40°时,线缆上相同位置的法向剪切力Sn逐渐减小。从图5(c)可见:相同位置上的副法向力矩Mb随着角度的增加而减小。
3.4 线缆长度对线缆力学特性的影响
当ROV匀速运动时,线缆的长度随绞盘车的收放而改变,入水角度,l1和l2也会随之改变。此处ROV速度为0.2 m/s(沿y轴方向),随着时间延长,线缆长度增加,线缆上端点的张力T、法向剪切力Sn和副法向力矩Mb变化如图6所示。
从图6(a)可以看出:随着时间延长,线缆长度增加,上端张力T呈线性减小,但减小幅度非常小。从图6(b)可以看出:随着线缆长度增加,法向剪切力Sn呈线性增加。从图6(c)可以看出:随着线缆长度增加,副法向力矩Mb呈现线性增加趋势,且增长幅度大。

图6 线缆长度对线缆稳态力学特性的影响
Fig. 6 Influence of cable length on steady-state mechanical characteristics of cable
4 结论
1) 当ROV(有缆水下机器人)运动速度从0.1 m/s增加到0.4 m/s(沿y轴方向)时,线缆上端点的张力和法向剪切力分别增大35%和5%,而上端点的副法向力矩减小10%;当池水高度从21 m降至16 m,线缆上端点的张力、法向力和副法向力矩增大约40%;当缆线入水角度从20°增加到40°时,上端点的张力增加了43%,但法向剪切力、副法向力矩分别减小了38%和50%;机器人沿y轴以0.2 m/s速度运动20 s,上端点的张力减少了3%,法向剪切力增加了15%,而副法向力矩增加了32%。
2) 本文的研究方法可用于评估ROV运动速度、水深、入水角度、线缆长度等因素对ROV稳态运动的影响,并为改进ROV设计和控制器设计提供参考。
参考文献:
[1] ZHENG Jie, TAGAMI K, UCHIDA S. Release of plutonium isotopes into the environment from the Fukushima Daiichi nuclear power plant accident: what is known and what needs to be known[J]. Environmental Science & Technology, 2013, 47(17): 9584-9595.
[2] ALEKSANDRA C. Revisiting the convention on nuclear safety: lessons learned from the Fukushima accident[J]. Asian Journal of International Law, 2013, 3(2): 365-391.
[3] HACHIYA M, AKASHI M. Lessons learned from the accident at the Fukushima Daiichi nuclear power plant―more than basic knowledge: education and its effects improve the preparedness and response to radiation emergency[J]. Radiation Protection Dosimetry, 2016, 171(1): 27-31.
[4] RAMADASS G A, RAMESH S, SELVAKUMAR J M, et al. Deep-ocean exploration using remotely operated vehicle at gas hydrate site in Krishna-Godavari basin, Bay of Bengal[J]. Current Science, 2010, 99(6): 809-815.
[5] SALGADO J T, GONZALEZ J L, MARTINEZ L F, et al. Deep water ROV design for the Mexican oil industry[C]// Oceans’10 IEEE Sydney Conference and Exhibition. Sydney, Australia: IEEE, 2010: 1-6.
[6] PARK S J, YEU T K, YOON S M, et al. A study of sweeping coverage path planning method for deep-sea manganese nodule mining robot[C]// OCEANS'11 MTS/IEEE Kona. Hawaii, America: IEEE, 2011: 1-5.
[7] VEDACHALAM N, RAMESH S, SUBRAMANIAN A N, et al. Design and development of remotely operated vehicle for shallow waters and polar research[C]// 2015 IEEE Underwater Technology. Chennai, India: IEEE, 2015: 1-5.
[8] WALTON T S, POLACHECH H. Calculation of transient motion of submerged cables[J]. Mathematics of Computation, 1960, 14(69): 27-46.
[9] ABLOW C M, SCHECHTER S. Numerical simulation of undersea cable dynamics[J]. Ocean Engineering, 1983, 10(6): 443-457.
[10] MILINAZZO F, WILKIE M, LATCHMAN S A. An efficient algorithm for simulating the dynamics of towed cable systems[J]. Ocean Engineering, 1987, 14(6): 513-526.
[11] CHIOU R B. Nonlinear hydrodynamic response of curved singly-connected cables[D]. Corvallis, USA: Oregon State University. College of Engineering, 1989: 32-41.
[12] DE Zoysa A P K. Steady-state analysis of undersea cables[J]. Ocean Engineering, 1978, 5(3): 209-223.
[13] FRISWELL M I. Steady-state analysis of underwater cables[J]. Journal of Waterway Port Coastal & Ocean Engineering, 1995, 121(2): 98-104.
[14] LEECH C M, TABARROK B. The cable geometry for a towed submersible[J]. International Journal of Mechanics Science, 1995, 37(10): 1079-1087.
[15] 王飞. 海洋勘探拖曳系统运动仿真与控制技术研究[D]. 上海: 上海交通大学船舶海洋与建筑工程学院, 2006: 16-21.
WANG Fei. Motion simulation and simulation of towing system for ocean exploration[D]. Shanghai: Shanghai Jiaotong University. School of Naval Architecture, Ocean& Civil Engineering, 2006: 16-21.
[16] WANG Fei, HUANG Guoliang. Steady state analysis of towed marine cables[J]. Journal of Shanghai Jiaotong University, 2008, 13(2): 239-244.
[17] 卢青针. 水下生产系统脐带缆的结构设计与验证[D]. 大连: 大连理工大学工程力学系, 2013: 20-25.
LU Qingzhen. Structural design and validation of umbilical of subsea production system[D]. Dalian: Dalian University of Technology. Department of Engineering Mechanics, 2013: 20-25.
[18] JAGADEESH P, MURALI K, IDICHANDY V G. Experimental investigation of hydrodynamic force coefficients over AUV hull form[J]. Ocean Engineering, 2009, 36(1): 113-118.
[19] ZHANG Jiantao, MAXWELL J A, GERBER A G, et al. Simulation of the flow over axisymmetric submarine hulls in steady turning[J]. Ocean Engineering, 2013, 57(1): 180-196.
[20] PRAVEEN P C, KRISHNANKUTTY P. Study on the effect of body length on the hydrodynamic performance of an axi- symmetric underwater vehicle[J]. Indian Journal of Geo-Marine Sciences, 2013, 42(8): 1013-1022.
[21] Xu S J, Han D F, Ma Q W. Hydrodynamic forces and moments acting on a remotely operate vehicle with an asymmetric shape moving in a vertical plane[J]. European Journal of Mechanics, 2015, 54: 1-9.
[22] Wang Chuanfeng, Zhang Fumin, Schaefer D. Dynamic modeling of an autonomous underwater vehicle[J]. Journal of Marine Science and Technology, 2015, 20(2): 199-212.
(编辑 伍锦花)
收稿日期:2017-12-20;修回日期:2018-02-01
基金项目(Foundation item):国家重点基础研究发展规划(973计划)项目(2013CB035502);国家自然科学基金资助项目(61673138) (Project (2013CB035502) supported by the National Basic Research Development Program(973 Program) of China; Project(61673138) supported by the National Natural Science Foundation of China)
通信作者:陶建国,博士,教授,从事特种机器人技术研究;E-mail: jgtao@hit.edu.cn

