»щУЪРйДвСщ»ъјјКхНЪѕт»ъ№¤ЧчЧ°ЦГ¶ЇБ¦С§·ЦОцј°·ВХж
ХЕ№рѕХ1, 2Ј¬Р¤ІЕФ¶2Ј¬М·За1Ј¬Ф¬ОД»Є2Ј¬ДЄУРи¤3
(1. ЦРДПґуС§ »ъµз№¤іМС§ФєЈ¬єюДП і¤ЙіЈ¬410083Ј»
2. ЙЫСфС§Фє »ъРµУлДЬФґ№¤іМПµЈ¬єюДП ЙЫСфЈ¬422004Ј»
3. №гОчУсІсЦШ№¤УРПЮ№«ЛѕТєС№јјКхСРѕїЛщЈ¬№гОч УсБЦЈ¬537005)
ХЄТЄЈєУ¦УГАёсАКИХ¶ЇБ¦С§ФАнЅЁБўНЪѕт»ъ№¤ЧчЧ°ЦГ¶ЇБ¦С§КэС§ДЈРНЈ¬ТФДіРН23 tНЪѕт»ъ№¤ЧчЧ°ЦГОЄСРѕї¶ФПуЈ¬ІЙУГPro/EИнјю¶ФёГНЪѕт»ъ№¤ЧчЧ°ЦГЅЁБўИэО¬КµМеДЈРНЈ¬УГРйДвСщ»ъјјКхУл¶ЇБ¦С§·ВХжИнјюADAMS¶ФНЪѕт»ъ№¤ЧчЧ°ЦГЅшРРФЛ¶ЇС§єН¶ЇБ¦С§·ВХжЈ¬»сµГНЪѕт»ъ№¤ЧчіЯґзІОКэЎўёчЅВЅУµгґ¦µДКЬБ¦Зйїцј°Па№ШКЬБ¦ЗъПЯЎЈСРѕїЅб№ы±нГчЈєФЛУГАёсАКИХ¶ЇБ¦С§ФАнЅЁБўµДНЪѕт»ъ№¤ЧчЧ°ЦГ¶ЇБ¦С§КэС§ДЈРНЈ¬ОЄНЪѕт»ъ№¤ЧчЧ°ЦГ·ВХжСРѕїМṩБЛ±гАыЈ»ЧоґуНЪѕтёЯ¶ИЎўЧоґуНЪѕт°лѕ¶ЎўЧоґуР¶ФШёЯ¶ИЎўЧоґуНЪѕт°лѕ¶НЈ»ъГжЙПЧоґуНЪѕт°лѕ¶УлКµјКЧчТµЅб№ыПаОЗєПЈ¬НЁ№э¶ЇБ¦С§·ВХж·ЦОцµГіцµДёчТєС№ёЧКЬБ¦ЗъПЯј°НЪѕт»ъёч№ШјьЅВЅУµгµДКЬБ¦ЗъПЯЈ¬ОЄНЪѕт»ъ№¤ЧчЧ°ЦГЅб№№ЙијЖУлІъЖ·УЕ»ЇМṩБЛТАѕЭєН·Ѕ·ЁЎЈ
№ШјьґКЈєНЪѕт»ъЈ»РйДвСщ»ъЈ»ФЛ¶ЇС§·ВХжЈ»¶ЇБ¦С§·ВХж
ЦРНј·ЦАаєЕЈєTP391.7 ОДПЧ±кЦѕВлЈєA ОДХВ±аєЕЈє1672-7207(2014)06-1827-07
Dynamic analysis and simulation of excavator working device based on virtual prototype technology
ZHANG Guiju1, 2, XIAO Caiyuan2, TAN Qing1, YUAN Wenhua2, MO Youyu3
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. Department of Mechanical and Energy Engineering, Shaoyang University, Shaoyang 422004, China;
3. Hydraulic Technology Institute of Guangxi Yuchai Heavy Industry Co. Ltd., Yulin 537005, China)
Abstract: The dynamics mathematical model of excavator working device was established by using the Lagrange dynamics principle. Taking a certain type of 23 t excavator as the research object, the software Pro/E was adopted to create the three-dimensional physical model of excavator working device, and kinematics and dynamics simulation of excavator working device were carried out with the virtual prototype technology and the software ADAMS. The operating parameters of excavator and the stress state of each joints as well as corresponding stress curves were obtained. The results show that the dynamics mathematical model of excavator working device with Lagrange dynamics principle provides the convenience for its simulation research. The simulation results matches well with the real working results, which provides the basis and method of structural design and products optimization for excavator working device.
Key words: excavator; virtual prototype; kinematics simulation; dynamics simulation
НЪѕт»ъФЪ№¤ТµЎўЕ©Тµ№¤іМЎўГсУГЅЁЦюЎўЅ»НЁФЛКдЎўїуЙЅІЙѕтЎўЛ®АыµзБ¦№¤іМТФј°ѕьКВ№¤іМµИБмУтЦРЖрЧЕ·ЗіЈЦШТЄµДЧчУГЎЈ№¤ЧчЧ°ЦГКЗНЪѕт»ъЅшРРНЪѕтЧчТµК±КµПЦёчПДЬµДЦШТЄЧйіЙІї·ЦЈ¬ФЪЧчТµ№эіМЦРКЬБ¦ёґФУЈ¬ФШєЙ±д»ЇЖµ·±Ј¬№¤ЧчМхјю¶сБУЈ¬іе»чєНХс¶Ї¶аЈ¬ЖдЅб№№Зї¶ИЦ±ЅУУ°ПмµЅНЪѕт»ъµДїЙїїРФєН№¤ЧчРФДЬ[1-5]Ј¬їЄХ№№¤ЧчЧ°ЦГ¶ЇБ¦С§·ЦОцТСіЙОЄНЪѕт»ъЅб№№ЎўТєС№ПµНієНїШЦЖПµНіЙијЖУл·ЦОцµД»щґЎ[6-7]ЎЈ°ґХХґ«Ні·Ѕ·Ё¶Ф№¤ЧчЧ°ЦГЅшРР¶ЇБ¦С§·ЦОцФміЙґуБїµДК±јдЎўЧКЅрАЛ·СЈ¬ЗТєЬДСУЕ»ЇµИЎЈДїЗ°Ј¬№ъДЪНв№ШУЪНЪѕт»ъ№¤ЧчЧ°ЦГµД¶ЇБ¦С§СРѕїґу¶аКэјЇЦРФЪЗї¶ИЎўёХ¶ИЎўЖЈАНЎўКЩГь·ЦОцЎўЅб№№УЕ»ЇµИ·ЅГж[8-10]Ј¬¶ш¶ФНЪѕт»ъ№¤ЧчЧ°ЦГ¶ЇМ¬№эіМµД¶ЇБ¦С§СРѕїЅПЙЩ[11]ЎЈОЄґЛЈ¬±ѕОДЧчХЯ»щУЪАёсАКИХ¶ЇБ¦С§ФАнЅЁБўНЪѕт»ъ¶ЇБ¦С§КэС§ДЈРНЈ¬ІЙУГPro/EєНADAMSИнјюЅЁБўДіРН23 tНЪѕт»ъ№¤ЧчЧ°ЦГИэО¬ДЈРНЈ¬УГРйДвСщ»ъјјКхУлADAMS¶ФНЪѕт»ъ№¤ЧчЧ°ЦГЅшРРФЛ¶ЇС§єН¶ЇБ¦С§·ВХжЈ¬»сµГНЪѕт»ъЦчТЄЧчТµІОКэєНёчёХМеЅВЅУµгґ¦µДКЬБ¦±д»ЇЗйїцЈ¬ТФ±гОЄУЕ»ЇУлЙијЖНЪѕт»ъ№¤ЧчЧ°ЦГМṩТАѕЭЎЈ
1 ТєС№НЪѕт»ъ№¤ЧчЧ°ЦГ¶ЇБ¦С§КэС§ДЈРН
НЪѕт»ъФЪ№¤Чч№эіМЦРЈ¬ФЛ¶ЇРОКЅ±д»Ї¶аСщЎЈОЄЧјИ·¶ФНЪѕт»ъ№¤ЧчЧ°ЦГЅшРР¶ЇБ¦С§·ЦОцЈ¬СРѕї№¤ЧчЧ°ЦГµДО»ТЖЎўФЛ¶ЇЎўЧчУГБ¦µИІОКэ±д»ЇЗйїцЈ¬УР±ШТЄЅЁБў¶ЇБ¦С§КэС§ДЈРНЎЈ±ѕОДУ¦УГАёсАКИХ¶ЇБ¦С§ФАн¶Ф№¤ЧчЧ°ЦГЅшРР¶ЇБ¦С§·ЦОцЈ¬УРАыУЪјт»ЇёґФУПµНіµД¶ЇБ¦С§ЗуЅв[12]ЎЈФЛУГАёсАКИХ·ЁЦ»РиЦЄµАёчёЛјюµДЦКБїЎўРэЧЄѕШХуЎў№ЯРФХЕБїєНЦКРДО»ЦГјґїЙјЖЛгФ¤ЙиФЛ¶ЇЛщРиµДТєС№Зэ¶ЇБ¦єНБ¦ѕШЈ¬ОЮРи¶ФГїёцёЛјюКЬБ¦ЅшРРЗуЅвЈ¬УРЦъУЪ¶ФНЪѕт»ъ№¤ЧчЧ°ЦГµД№¤ЧчЧґМ¬єНЅб№№ІОКэЅшРР¶ЇБ¦С§·ЦОц[13]ЎЈ
1.1 №¤ЧчЧ°ЦГФЛ¶ЇЧш±кПµµДЅЁБў
ФЛУГD-HЖлґОЧш±к±д»»·ЁЅЁБўёЛјюЧш±кПµЈ¬ИзНј1ЛщКѕЎЈ№¤ЧчЧ°ЦГїЙТФЅьЛЖОЄИэЧФУЙ¶ИїХјдБ¬ёЛЅб№№Ј¬°ьАЁ¶Ї±ЫИЖ»щЧщµДРэЧЄ»ъ№№ЎўёЛИЖ¶Ї±ЫµДРэЧЄ»ъ№№ј°Іщ¶·ИЖ¶·ёЛµДРэЧЄ»ъ№№ЎЈЧш±кФµг·Ц±рСЎИЎ¶Ї±ЫУл»щЧщµДЅВµгA1Ўў¶Ї±ЫУл¶·ёЛµДЅВµгA2Ўў¶·ёЛУлІщ¶·µДЅВµгA3ТФј°Іщ¶·іЭјвО»ЦГA4Ј»ЅВµгA1Чш±кПµµДXЦб·ЅПтУлµШГжЛ®ЖЅЈ¬ZЦбИЎЅВµгµД»ШЧЄЦбПЯЈ»ЅВµгA2Чш±кПµµДXЦбИЎ¶Ї±ЫєН¶·ёЛЅВµгБ¬ПЯЈ¬ZЦбИЎЅВµгµД»ШЧЄЦбПЯЈ»ЅВµгA3Чш±кПµµДXЦбО»УЪ¶·ёЛєНІщ¶·ЅВµгБ¬ПЯЙПЈ¬ZЦбОЄЅВµгµД»ШЧЄЦбПЯЈ»A4Чш±кПµXЦбО»УЪіЭјвУлІщ¶·¶·ёЛЅВµгµДБ¬ПЯЙПЎЈ
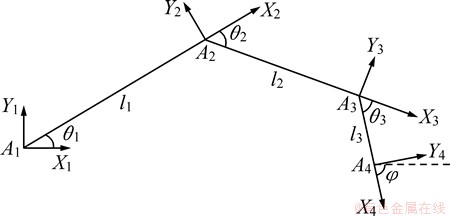
Нј1 НЪѕт»ъ№¤ЧчЧ°ЦГЧш±кПµКѕТвНј
Fig. 1 Schematic diagram of excavator working device of coordinate system
ёщѕЭD-HЖлґОЧш±к±д»»·ЁЈ¬ёч№№јюД©¶ЛО»ЧЛМ¬їЙТФНЁ№эёчёЛјю±д»»ѕШХуЗуµГЈє
 (1)
(1)
ЖдЦРЈєn=3Ј»0TnОЄёчёЛјю±дБї¦И1Ј¬¦И2єН¦И3µДєЇКэЈ»i-1AiОЄiЧш±кПµ¶Фi-1µДПа¶Ф±д»»ѕШХуЈ¬
 (2)
(2)
i-1RiОЄ№ШЅЪЧЛМ¬±дБїЈ»i-1PiОЄ№ШЅЪО»ЦГѕШХуЎЈ
1.2 №¤ЧчЧ°ЦГФЛ¶ЇС§КэС§ДЈРН
ёщѕЭЧш±кЖлґО±д»»·ЁЈ¬Чш±кПµПа¶Ф»щµгµДІщ¶·¶·іЭјв¶ЛµгA4Чш±кПтБї0PїЙ±нКѕОЄ
 Ј»i=0Ј¬1Ј¬ЎЈ¬n-1 (3)
Ј»i=0Ј¬1Ј¬ЎЈ¬n-1 (3)
Іщ¶·¶·іЭјв¶ЛµгЧш±кПтБї±нКѕОЄ[XЈ¬YЈ¬Z]TЈ¬ФтЅВµгA2µДО»ЦГЧш±кОЄ
 (4)
(4)
ЅВµгA3µДО»ЦГЧш±кОЄ
 (5)
(5)
¶·іЭјв¶ЛµгA4µДО»ЦГЧш±кОЄ
 (6)
(6)
Чш±кПµИОТвµгПтБїПа¶Ф»щЧш±кµДЛЩ¶И±нґпКЅОЄ
 Ј»i=1Ј¬2Ј¬ЎЈ¬n (7)
Ј»i=1Ј¬2Ј¬ЎЈ¬n (7)
ЅВµгA2µДЛЩ¶ИЧш±кОЄ
 (8)
(8)
ЅВµгA3µДЛЩ¶ИЧш±кОЄ
 (9)
(9)
Іщ¶·¶·іЭјв¶ЛµгA4µДјУЛЩ¶ИЧш±к±нКѕКЅОЄ
 (10)
(10)
Чш±кПµИОТвµгПтБїПа¶Ф»щЧш±кµДјУЛЩ¶И±нґпКЅОЄ
 Ј»i=1Ј¬2Ј¬ЎЈ¬n (11)
Ј»i=1Ј¬2Ј¬ЎЈ¬n (11)
ЅВµгA2µДјУЛЩ¶ИЧш±кОЄ
 (12)
(12)
ЅВµгA3µДјУЛЩ¶ИЧш±кОЄ
 (13)
(13)
1.3 №¤ЧчЧ°ЦГ¶ЇБ¦С§КэС§ДЈРН
ФЛУГАёсАКИХ·ЁЈ¬НЪѕт»ъµД¶ЇБ¦С§·ЅіМїЙ±нКѕОЄ
 (14)
(14)
КЅЦРЈєTiОЄЧчУГУЪёЛјюЙПµДЗэ¶ЇБ¦Ј»Kij(¦И)ОЄёЛјюЧЄ¶Ї№ЯБїЈ»HijtОЄ№ШЅЪјдµДПтРДБ¦»тёзКПБ¦ЧчУГПоЈ»Gi(¦И)ОЄЦШБ¦ПоЎЈ
KijЈ¬HijtєНGiѕјт»Їєу№«КЅїЙ±нКѕОЄ
 (15)
(15)
КЅЦРЈєmsОЄёЛјюsµДЦКБїЈ»¦ДОЄДіµгMЗРПЯєНёГµгКёѕ¶µДјРЅЗЈ»ksОЄДіµгMµДЅ»ІжсоєПµДПµКэѕШХуЈ»di(dj)ОЄxi(yj)µЅxi-1(yj-1)СШziµДІвБїѕаАлЈ»s¦ГsОЄёЛјюsµДЦКРДґ¦УЪёЛјюЧш±кПµЦРµДЧш±кО»ЦГЈ»gОЄЦШБ¦јУЛЩ¶ИЎЈ
 (16)
(16)
 (17)
(17)
КЅЦРЈє Ј»
Ј» Ј»
Ј» ОЄёЛјюsµДЦКРДФЪЧш±кПµi-1ЦРµДЧш±кЎЈ
ОЄёЛјюsµДЦКРДФЪЧш±кПµi-1ЦРµДЧш±кЎЈ
2 НЪѕт»ъ№¤ЧчЧ°ЦГДЈРНµДЅЁБў
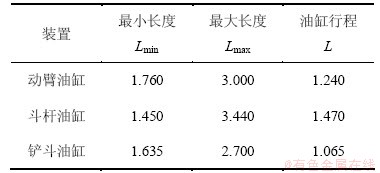
ТєС№НЪѕт»ъµД№¤ЧчЧ°ЦГЦчТЄУЙ¶Ї±ЫЎў¶·ёЛєНІщ¶·µИЦчТЄІїјю№№іЙЈ¬НЪѕт»ъ№¤ЧчЧ°ЦГµД№¤Чч·¶О§ЦчТЄУЙ№¤ЧчЧ°ЦГТєС№УНёЧРРіМѕц¶ЁЈ¬±ѕОДСРѕїµДДіРН23 tНЪѕт»ъ№¤ЧчЧ°ЦГТєС№УНёЧІОКэИз±н1ЛщКѕЎЈКЧПИЈ¬ІЙУГФЪИэО¬ІОКэ»ЇЙијЖИнјюPro/E ЦР¶ФНЪѕт»ъ№¤ЧчЧ°ЦГЅшРРјёєОЅЁДЈЈ¬ИзНј1ЛщКѕЈ»НкіЙЧйЧ°Ц®єуЈ¬Ѕ«ЖдµјИлЦБADAMSИнјюЦРЎЈФЪADAMS»·ѕіПВ¶Ф№¤ЧчЧ°ЦГДЈРН¶ЁТеёХМеЈ¬МнјУєПККФЛ¶Їё±єНФјКшЈ¬ІўОЄПа№ШФЛ¶Їё±МнјУЗэ¶ЇєЇКэЈ¬ёш№¤ЧчЧ°ЦГДЈРНМнјУНвФШєЙЎЈ
±н1 №¤ЧчЧ°ЦГТєС№УНёЧІОКэ
Table 1 Hydraulic cylinder parameters for working device m
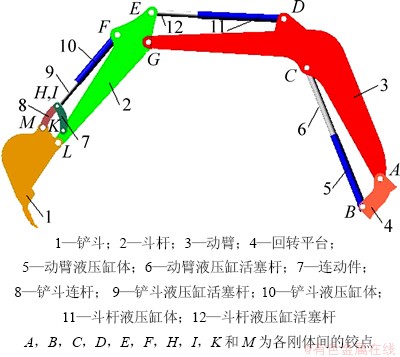
Нј2 №¤ЧчЧ°ЦГ·ВХжДЈРН
Fig. 2 Simulation model of working device
3 ТєС№НЪѕт»ъ№¤ЧчЧ°ЦГµДФЛ¶ЇС§·ВХж·ЦОц
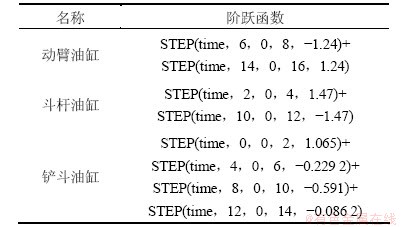
НЪѕт»ъµДЦчТЄ№¤ЧчіЯґзКЗНЪѕт»ъРФДЬµДЦШТЄЦё±кЈ¬Н¬К±ТІКЗНЪѕт»ъ№¤ЧчЧ°ЦГР§ДЬ·ВХжµДЦчТЄЖА№АІОКэЈ¬ЦчТЄ°ьАЁЧоґуНЪѕтёЯ¶Иh1ЎўЧоґуНЪѕтЙо¶Иh2ЎўЧоґуР¶ФШёЯ¶Иh3ЎўЧоґуНЪѕт°лѕ¶r0ЎўНЈ»ъГжЙПЧоґуНЪѕт°лѕ¶r1єНЧоґуНЪѕтёЯ¶Иґ¦НЪѕт°лѕ¶r2ЎЈОЄ»сµГТєС№НЪѕт»ъµДЦчТЄ№¤ЧчіЯґзІОКэЈ¬ІЙУГADAMSЧФґшµДЅЧФѕ(STEP)єЇКэАґїШЦЖТєС№УНёЧµДЙмЛхРРіМЈ¬ЅЧФѕєЇКэёсКЅОЄ

КЅЦРЈєxОЄЧФ±дБїЈ»x0ОЄЧФ±дБїµДіхКјЦµЈ»t0ОЄxРЎУЪx0К±µДєЇКэЦµЈ»x1ОЄЅЧФѕЅбКшєуµДЧФ±дБїЦµЈ»t1ОЄxґуУЪx1К±µДєЇКэЦµЎЈёчТєС№УНёЧЅЧФѕєЇКэИз±н2ЛщКѕЈ¬ФЪADAMSЦРµДЗэ¶ЇєЇКэЗъПЯИзНј3ЛщКѕЎЈ
ЙиЦГёчёцТєС№УНёЧЅЧФѕєЇКэЈ¬ФЪІщ¶·іЭјвґ¦ґґЅЁ»щ±ѕІвБїµгЈ¬¶Ф№¤ЧчЧ°ЦГЅшРРКэЦµ·ВХжјЖЛгІўПФКѕЅб№ыЎЈНј4ЛщКѕОЄНЁ№эФЛ¶Ї·ВХж»жЦЖіцАґµДНЪѕт»ъ№¤ЧчЧ°ЦГЦчТЄЧчТµ·¶О§Ј¬Нј5ЛщКѕОЄ¶·іЭјвО»ТЖЗъПЯЎЈ
±н2 ТєС№УНёЧЅЧФѕєЇКэ
Table 2 Driving functions of hydraulic cylinders
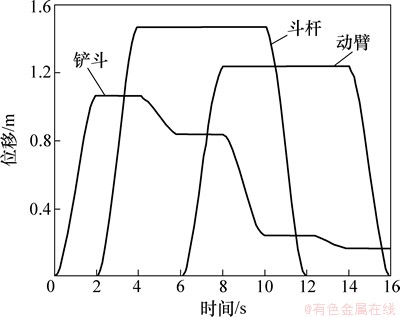
Нј3 ¶Ї±ЫЎў¶·ёЛєНІщ¶·Зэ¶ЇєЇКэЗъПЯ
Fig. 3 Drive function curves of boom, bucket rod and bucket
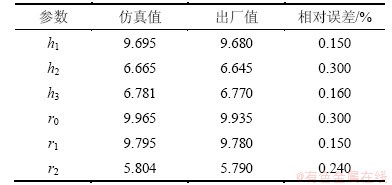
ґУНј5їЙТФµГµЅТєС№НЪѕт»ъ№¤ЧчЧ°ЦГЦчТЄЧчТµіЯґзЎЈОЄБЛСйЦ¤·ВХжДЈРНµДїЙїїРФЈ¬Ѕ«Нј4ЎўНј5ЛщКѕ·ВХжЦµУлІъЖ·іці§ЦµЅшРР±ИЅПЈ¬Из±н3ЛщКѕЎЈґУ±н3їЙјыЈєёчёцІОКэПа¶ФОуІоЧоРЎОЄ0.15%Ј¬ЧоґуОЄ0.30%Ј¬·ВХжЦµУлі§јТіці§±кКѕЦµЅПОЗєПЎЈ
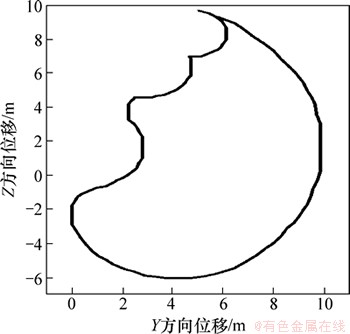
Нј4 ТєС№НЪѕт»ъЦчТЄЧчТµ·¶О§
Fig. 4 Main operating range of hydraulic excavator
Нј5 ¶·іЭјвО»ТЖЗъПЯ
Fig. 5 Displacement curves of bucket teeth tip
±н3 НЪѕт»ъ№¤ЧчіЯґз
Table 3 Comparison of operating depth for excavator m
4 ТєС№НЪѕт»ъ№¤ЧчЧ°ЦГµД¶ЇБ¦С§·ВХж·ЦОц
4.1 НЪѕтФШєЙµДјЖЛг
ТєС№НЪѕт»ъФЪНЪѕтЧчТµК±Ј¬НЁіЈКЗТФёчТєС№ёЧН¬К±ЙмЛхµДёґєПНЪѕт·ЅКЅЅшРРЎЈФЪёГ№¤їцПВЈ¬НЪѕт»ъДЬід·ЦОьКХ¶ЇБ¦Ј¬ґпµЅБЛЅЪДЬµДР§№ыЈ¬¶шЗТДЬјхЙЩґуБї№¤ЧчК±јдЈ¬УРР§µШМбёЯНЪѕт»ъ№¤ЧчР§ВКЎЈУЙУЪФЪНЪѕт№эіМЦРУцµЅµДНвФШєЙІ»ЅцКЗУ°ПмНЪѕт»ъїЙїїРФєННЪѕтДЬБ¦µДЦчТЄТтЛШЈ¬¶шЗТКЗНЪѕт»ъ№¤ЧчЧ°ЦГёчЅВЅУµгЧчУГБ¦ІъЙъµДЦчТЄАґФґЈ¬№КУР±ШТЄЅшТ»ІЅ·ЦОцНЪѕт»ъЛщКЬµДНвФШєЙЈ¬ІўЅшРРјЖЛгЎЈНЪѕт»ъНвФШєЙ°ьАЁНЪѕт№эіМЦРНЪѕтНБИАЛщІъЙъµДНЪѕтЧиБ¦єННЪѕтОпБПІъЙъµДЦШБ¦ЎЈНЪѕтЧиБ¦їЙТФ°ґХХНЪѕт№мјЈ·ЅПт·ЦОЄЗРПтНЪѕтЧиБ¦WQєН·ЁПтНЪѕтЧиБ¦WFЈ¬ЖдѕС鹫ʽИзПВ[14]Јє
 (19)
(19)
 (20)
(20)
КЅЦРЈєK0ОЄНЪѕт±ИЧиБ¦ПµКэ(N/cm2)Ј»bОЄ¶·їн»тНЪѕтїн¶И(cm)Ј»hОЄНЪѕтЙо¶ИЈ¬Т»°гИЎ(0.1~0.33)bЈ»¦УОЄНЪѕтЧиБ¦ПµКэЎЈ
ёщѕЭОДПЧ[15-16]Ј¬НЪѕтНБИААаРНИЎўуј¶Ј¬НЪѕт±ИЧиБ¦ПµКэK0ИЎ19.5 N/cm2Ј¬¶·їн»тНЪѕтїн¶ИbИЎ120 cmЈ¬НЪѕтЙо¶ИhОЄ¶·їнbµД0.2±¶Ј¬h=2.4 mЈ¬НЪѕтЧиБ¦ПµКэ¦УИЎОЄ0.42ЎЈНЁ№эјЖЛгЈ¬ЗРПтНЪѕтЧиБ¦WQОЄ56.16 kNЈ¬·ЁПтНЪѕтЧиБ¦WFОЄ23.59 kNЎЈ
НЪѕтОпБПІъЙъµДЦШБ¦јЖЛ㹫ʽΪ
 (21)
(21)
КЅЦРЈє¦СОЄНБИАГЬ¶ИЈ¬ИЎ1.8ЎБ10-6 kg/m3Ј»vОЄІщ¶·µДИЭ»эЈ¬ИЎ1.05 m3Ј»gОЄЦШБ¦јУЛЩ¶ИЈ¬ИЎ9.8 m/s2ЎЈНЁ№эјЖЛгЈ¬µГG=18.5 kNЎЈ
4.2 НЪѕтФШєЙјУФШ
ёщѕЭКµјКЗйїцЈ¬ФЛУГSTEPЅЧФѕєЇКэДЈДвФШєЙµДјУФШ№эіМЎЈЗРПтНЪѕтЧиБ¦Ўў·ЁПтНЪѕтЧиБ¦ј°Па№ШЧш±кПµјУФШУЪ¶·іЭЦРјдО»ЦГґ¦Ј¬СШ¶·іЭ№мјЈµДЗРПЯ·ЅПтјУФШЗРПтНЪѕтЧиБ¦Ј¬СШ¶·іЭ№мјЈµД·ЁПЯ·ЅПтјУФШ·ЁПтНЪѕтЧиБ¦Ј»НЪѕтОпБПІъЙъµДЦШБ¦јУФШУЪІщ¶·µДЦРІїЈ¬·ЅПтКјЦХКъЦ±ПтПВЎЈЗРПтНЪѕтЧиБ¦єН·ЁПтНЪѕтЦъБ¦ФЪНЪѕтіхЖЪіКФцґуЗчКЖЈ¬ФЪєуЖЪСёЛЩјхЙЩЈ»ОпБПЦШБ¦ФЪНЪѕт№эіМЦРУЙ0 kNФцјУµЅЧоґуЦµЈ¬Р¶БПєуСёЛЩјхЙЩµЅ0 kNЈ¬НЪѕт»ъ№¤ЧчЧ°ЦГНвФШєЙЗъПЯИзНј6ЛщКѕЎЈ
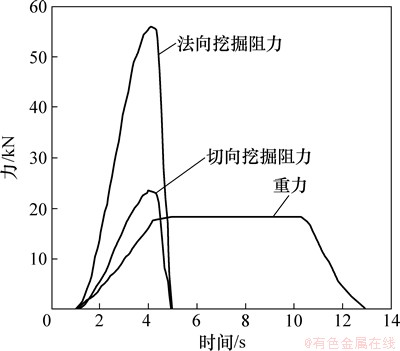
Нј6 НЪѕт»ъ№¤ЧчЧ°ЦГНвФШєЙЗъПЯНј
Fig. 6 Load curves of excavator working device
УЙНј6їЙТФїґіцЈєНЪѕтФШєЙµДјУФШ№эіМУлФЛ¶Ї·ВХж№эіМЦРФЪК±јдЙППа¶ФУ¦,·ґУіБЛНЪѕт№эіМЦРМнјУµДАнВЫФШєЙ·ыєПКµјК№жВЙЎЈ
4.3 №¤ЧчЧ°ЦГµДФЛБ¦С§·ВХж·ЦОц
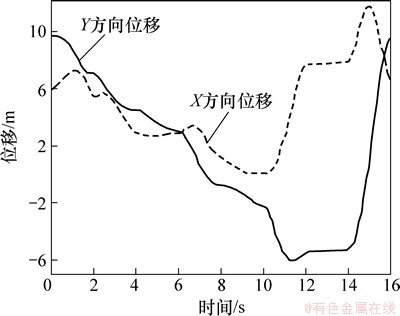
ЙиЦГТєС№НЪѕт»ъДЈРНµД»щ±ѕІОКэєуЈ¬ЅшРР¶ЇБ¦С§·ВХжЎЈ·ВХжК±јдОЄ16 sЈ¬·ВХжІЅі¤ОЄ500Ј¬ФЪ·ВХж№эіМЦРИнјюЧФ¶ЇјЖЛгёчёцёХМејдµДЧчУГБ¦Ј¬їЙµГµЅёчЦШТЄБгјюєНЅВµгµДО»ТЖєНФШєЙ±д»ЇЗйїцЎЈНј7ЛщКѕОЄІщ¶·¶·іЭіЭјвµДО»ТЖЗъПЯЎЈ
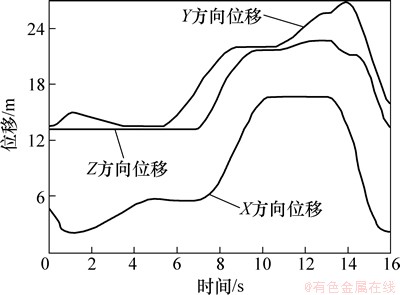
Нј7 Іщ¶·¶·іЭіЭјвµДО»ТЖЗъПЯ
Fig. 7 Displacement curves of bucket teeth tip
УЙНј7їЙТФїґіцІщ¶·¶·јвµДО»ТЖ±д»ЇУлКµјКЗйїцПа·ыєПЈєКЧПИЈ¬Іщ¶·¶·јвФЪZ·ЅПтЙПµДО»ТЖ±ЈіЦІ»±дЈ¬ФЪXYЖЅГжДЪФЛ¶ЇКµПЦНЪѕтЧчТµЈ»ЛжєуЈ¬ФЪXЈ¬YєНZ·ЅПтІ»¶П±д»ЇКµПЦМ§±Ы»ШЧЄЈ»М§±Ы»ШЧЄЅбКшїЄКјР¶ФШЈ»Р¶ФШНкіЙєуЈ¬Ѕµ±Ы»ШЧЄЈ¬·µ»ШµЅНЪѕт№¤ЧчµгЎЈ
Нј8ЛщКѕОЄёчТєС№УНёЧФЪНЪѕтЧчТµ№эіМЦРС№Б¦±д»ЇЗъПЯЎЈґУНј8їЙТФїґіцЈє0~2 sґ¦УЪНЪѕтЧј±ёЅЧ¶ОЈ¬ёчТєС№УНёЧС№Б¦УРРЎ·щ¶ИІЁ¶ЇЈ¬УЙУЪЅµ±Ы¶ЇЧчЦчТЄ·ўЙъФЪ¶Ї±ЫЙПЈ¬ЛщТФЈ¬С№Б¦µД±д»ЇЅПґуЈ»ФЪНЪѕтЧчТµїЄКјЗ°Ј¬ёчТєС№ёЧУНС№Б¦»ШВдµЅ0 kNЈ»ЅшИлНЪѕтЧчТµК±Ј¬ёчТєС№УНёЧС№Б¦ФЪЗРПтєН·ЁПтЧиБ¦ЧчУГПВЦрЅҐФцґуЈ»3 sК±Ј¬¶Ї±ЫУНёЧС№Б¦ґпЧоґуЦµ85 kNЧуУТЈ»3~4 sК±Ј¬Іщ¶·НЪѕт№эіМЦчТЄУЙ¶·ёЛєНІщ¶·ТєС№ёЧ№ІН¬ЧчУГЈ¬4 sК±НЪѕтЙо¶ИґпµЅЧоґуЦµЈ¬ФЪ¶·ёЛТєС№ёЧС№Б¦Чоґуґп96 kNЧуУТЈ»µ±НЪѕт№эіМµДЅбКшК±Ј¬ЗРПтєН·ЁПтЧиБ¦јхРЎЈ¬ёчТєС№УНёЧС№Б¦СёЛЩ»ШВдµЅ0 kNЈ»4.5~5.0 sК±ґ¦УЪОпБПМбЙэЅЧ¶ОЈ¬¶Ї±ЫТєС№ёЧЖрЦчТЄЧчУГЈ¬¶Ї±ЫУНёЧС№Б¦ФцјУµЅ50 kNЧуУТЈ¬¶·ёЛУНёЧС№Б¦РЎ·щ¶И±д»ЇЈ¬Іщ¶·УНёЧС№Б¦±д»ЇЅПЙЩЈ»5~13 sК±ґ¦УЪ»ШЧЄЅЧ¶ОЈ¬ёчТєС№ёЧС№Б¦ѕщ±ЈіЦФЪТ»ёцПа¶ФОИ¶Ё·¶О§Ј»13~14 sК±ґ¦УЪР¶БПЅЧ¶ОЈ¬Іщ¶·єН¶·ёЛµДТєС№ёЧС№Б¦±д»ЇЅПРЎЈ¬¶Ї±ЫёЧР¶БПЗ°єуС№Б¦±д»ЇЅПґуЈ¬ХвКЗУЙУЪ¶Ї±ЫґжФЪТ»ёцР¶БПМ§Йэ№эіМЎЈґУХыёцНЪѕтЧчТµ№эіМїґЈ¬Іщ¶·єН¶·ёЛµДТєС№ёЧС№Б¦±д»ЇЗчКЖ»щ±ѕТ»ЦВЈ¬¶ш¶Ї±ЫТєС№ёЧ±д»Ї±ИЅПГчПФЈ»НЪѕт»ъµДЧчТµС»·УлКµјКЧчТµЗйїцПа·ыЈ¬ёчТєС№ёЧКЬБ¦µД±д»ЇЗъПЯУлАнВЫјЖЛгТІПаОЗєПЎЈ
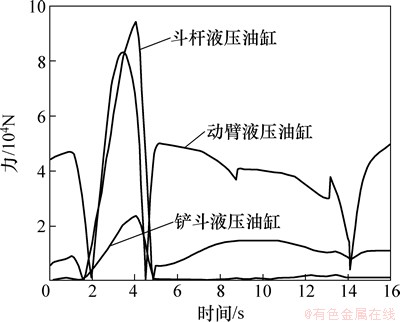
Нј8 ¶Ї±ЫЎў¶·ёЛєНІщ¶·ТєС№УНёЧКЬБ¦±д»ЇЗъПЯ
Fig. 8 Force variation curves of hydraulic cylinder for boom, bucket rod and bucket
Нј9єННј10ЛщКѕ·Ц±рОЄ¶Ї±ЫЎў¶·ёЛЙПёчЅВЅУµгКЬБ¦±д»ЇЗъПЯЎЈґУНј9єННј10їЙТФїґіцЈє0~2 sДЪґ¦УЪНЪѕтЧј±ёЅЧ¶ОЈ¬ёчЅВЅУµгФјКш·ґБ¦УРРЎ·щ¶ИІЁ¶ЇЈ¬УЙУЪЅµ±Ы¶ЇЧчЦчТЄ·ўЙъФЪ¶Ї±ЫЙПЈ¬¶Ї±ЫЙПЅВЅУµг(AЈ¬CЈ¬DЈ¬G)єН¶·ёЛЙПЅВЅУµг(E)ФјКш·ґБ¦±д»ЇЅПґуЈ»НЪѕтЧчТµїЄКјЗ°Ј¬¶Ї±ЫєН¶·ёЛЙПёчЅВµгФјКш·ґБ¦»ШВдЅУЅь0 kNЈ»ЅшИлНЪѕтЧчТµК±Ј¬ЛжЧЕНЪѕтЗРПтєН·ЁПтЧиБ¦ФцґуЈ¬ёчЅВЅУµгґ¦µДФјКш·ґБ¦ЦрЅҐФцґуЈ»ФЪ3.5 sЧуУТЈ¬НЪѕтЗРПтєН·ЁПтЧиБ¦ґпµЅ·еЦµЈ¬ёчЅВЅУµгТІПајМґпµЅЧоґуКЬБ¦ЧґМ¬Ј¬ЖдЦР¶Ї±ЫУл¶·ёЛЅВЅУµгGµДКЬБ¦ЧоґуЈ¬ёЯґп98 kNЧуУТЈ»ЖдґОЈ¬¶·ёЛТєС№ёЧ»оИыёЛјюєН¶·ёЛЅВЅУµгEЎў¶·ёЛТєС№ёЧМеУл¶Ї±ЫЅВЅУµгDґ¦УЪНЪѕтЙо¶ИјґґпµЅЧоґуЦµК±Ј¬ФјКш·ґБ¦ґ¦УЪЧоґуЦµ86 kNЧуУТЈ»µЅ4.8 sК±Ј¬Іщ¶·НЪѕтЧчТµ№эіМ»щ±ѕЅбКшЈ¬№¤ЧчЧ°ЦГФЛ¶ЇЅцКЬНЪИлІщ¶·µДОпБПЦШБ¦ј°Іщ¶·Ўў¶·ёЛЧФЦШµДУ°ПмЈ¬ёчЅВЅУµгКЬБ¦¶јО¬іЦФЪПа¶ФЅПРЎЦµЎЈ
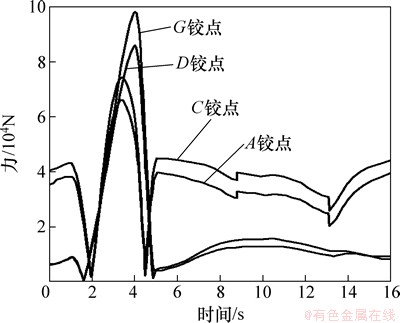
Нј9 ¶Ї±ЫЙПёчЅВµгµДКЬБ¦±д»ЇЗъПЯ
Fig. 9 Force variation curves of each joint of boom
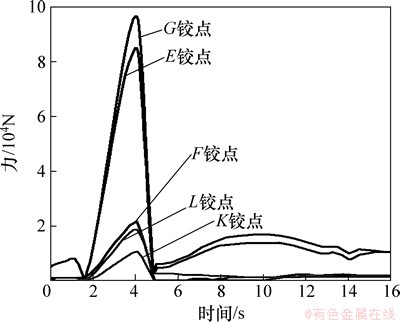
Нј10 ¶·ёЛЙПёчЅВµгµДКЬБ¦±д»ЇЗъПЯ
Fig. 10 Force variation curves of each joint of bucket rod
ґУНј9єННј10їЙјыЈєТєС№НЪѕт»ъ¶Ї±ЫЎў¶·ёЛЙПµДёчЅВЅУµгµДКЬБ¦ЗйїцЛжНЪѕтЗРПтєН·ЁПтЧиБ¦µД±д»Ї¶ш±д»ЇЈ¬ЖдЧоґуЦµУлНЪѕтЗРПтєН·ЁПтЧиБ¦µД·еЦµіцПЦК±јд»щ±ѕТ»ЦВЈ»¶Ї±ЫУл¶·ёЛЅВЅУµгКЬБ¦±д»ЇЧоѕзБТЈ¬ЗТ·еЦµЧоґуЈ¬ТтґЛЈ¬ФЪЅВµг(G)ґ¦їЙТФїјВЗУРХл¶ФРФµШЙијЖЈ¬ИзККµ±ФцјУґЛґ¦Б¬ЅУПъµДЦ±ѕ¶ЎўФцєсБ¬ЅУґ¦µДёЦ°еµИЎЈ
5 ЅбВЫ
(1) ФЛУГD-H ЖлґОЧш±к±д»»·ЁЅЁБўБЛНЪѕт»ъ№¤ЧчЧ°ЦГµДФЛ¶ЇС§ДЈРНЈ»ФЛУГАёсАКИХ·ЅіМФАнЅЁБўБЛ№¤ЧчЧ°ЦГµДПµНі¶ЇБ¦С§ДЈРНЈ¬ОЄ№¤ЧчЧ°ЦГ·ВХж·ЦОцМṩБЛ±гАыЎЈ
(2) Ѕ«Pro/EєНADAMSИнјюПаЅбєПЈ¬ЅЁБўБЛНЪѕт»ъ№¤ЧчЧ°ЦГµД·ВХжДЈРНЈ¬МбёЯБЛНЪѕт»ъ№¤ЧчЧ°ЦГіЯґзѕ«¶ИУлЧ°Едѕ«¶ИЈ¬ОЄ№¤ЧчЧ°ЦГµДёчЧйіЙІїјюєНДЈРНµДРЮёДУл·ВХжМṩёьјУЦ±№Ы±гЅЭµДНѕѕ¶ЎЈ
(3) ФЛ¶ЇС§µД·ВХжЅб№ыУлНЪѕт»ъКµјКіці§№¤ЧчІОКэЅшРР¶Ф±ИЈ¬БЅХЯЅПОЗєПЈ¬±нГчЛщЅЁБўµДНЪѕт»ъДЈРНїЙОЄЅшТ»ІЅЙијЖУЕ»ЇМṩІОїјЎЈ
(4) НЁ№э¶ФНЪѕт»ъ№¤ЧчЧ°ЦГЅшРР¶ЇБ¦С§·ВХж·ЦОцЈ¬µГµЅёчТєС№ёЧКЬБ¦ЗъПЯНјј°НЪѕт»ъ№ШёчјьЅВЅУµгµДКЬБ¦ЗъПЯНјЈ¬¶ФёДЅшПЦУРІъЖ·ЙијЖЦКБї»тУЕ»ЇРВІъЖ·µДЙијЖїЄ·ў¶јѕЯУРЦШТЄТвТеЎЈ
(5) АыУГјЖЛг»ъ·ВХжјјКхЅшРРІъЖ·ЙијЖїЄ·ўЈ¬УРЦъУЪЛх¶МІъЖ·µДЙијЖЦЬЖЪЈ¬ЅЪКЎїЄ·ўіЙ±ѕЈ¬ОЄІъЖ·µДКµјКРФДЬІОКэМṩБЛїЙїїЎўУРР§µДІОХХЎЈ
ІОїјОДПЧЈє
[1] Zweiri Y H, Seneviratne L D, Althoefer K. A generalized Newton method for identification of closed-chain excavator arm parameters[M]. New York: International Conference on Robotics and Automation, 2003: 103-108.
[2] ЧжРс, »ЖєйЦУ, ХЕРс. РйДвСщ»ъјјКхј°Жд·ўХ№[J]. Е©Тµ»ъеѧ±Ё, 2004, 20(2): 168-171.
ZU Xu, HUANG Hongzhong, ZHANG Xu. Virtual prototyping and its development[J]. Transactions of the Chinese Society of Agricultural Machinery, 2004, 20(2): 168-171.
[3] ZHANG Xuehua, XIE Huangsheng, TANG Qingshun. Co-simulation of mechanism-hydraulics working device of loader zl-50 based on ADAMS[C]//The 16th International Conference on Fluid Dynamic and Mechanical & Electrical Control Engineering (FDMECE2012). Chongqing: Chinese Association of Fluid Power Control Engineering, 2012: 186-191.
[4] Ен°ЧЛ®. №ъДЪНві¬ґуРНТєС№НЪѕт»ъХ№Ны[J]. ЅЁЙи»ъРµјјКхУл№ЬАн, 2008(9): 37-38.
PENG Baishui. Prospect of overseas and domestic extra large hydraulic excavators[J]. Construction Machinery Technology & Management, 2008(9): 37-38.
[5] ЦЬУВ, ЛОґє»Є. №ъДЪНвТєС№НЪѕт»ъµД·ўХ№¶ЇПт[J]. їуЙЅ»ъРµ, 2008, 36(8): 13-16.
ZHOU Yong, SONG Chunhua. Development trends of hydraulic excavators in the world[J]. Mining & Processing Equipment, 2008, 36(8): 13-16.
[6] Koivo A J, Thoma M, Kocaoglan E, et al. Modeling and control of excavator dynamics during digging operation[J]. Journal of Aerospace Engineering, 1996, 6(1): 8451-8459.
[7] Lever P A, Wang F Y. Intelligent excavation control system for lunar mining system[J]. Journal of Aerospace Engineering, 1995, 8(1): 16-24.
[8] L Chang, ZHANG Jihong. Excavating force analysis and calculation of dipper handle[C]//IEEE International Conference on Consumer Electronics, Communications and Networks, Xianning, China, 2011: 4068-4071.
Chang, ZHANG Jihong. Excavating force analysis and calculation of dipper handle[C]//IEEE International Conference on Consumer Electronics, Communications and Networks, Xianning, China, 2011: 4068-4071.
[9] Lee M C, Chung S H, Cho J H, et al. Three-dimensional finite element analysis of powder compaction process for forming cylinder block of hydraulic pump[J]. Powder Metallurgy, 2008, 51(1): 89-94.
[10] Sui T Z, Wang L, Tan Z, et al. Structural parameters optimization of excavator working device based on mining process[J]. Advanced Materials Research, 2012, 421: 759-763.
[11] ХЕКчЦТ, µЛ±у, їВјб. »щУЪТєС№±дС№ЖчµДНЪѕт»ъ¶Ї±ЫКЖДЬФЩЙъПµНі[J]. ЦР№ъ»ъРµ№¤іМ, 2010, 21(10): 1160-1166.
ZHANG Shuzhong, DENG Bin, KE Jian. Research on energy regeneration system of hydraulic excavatorЎЇs boom based on hydraulic transformer[J]. China Mechanical Engineering, 2010, 21(10): 1160-1166.
[12] БхЕф»ў, ХЕУВ, ХЕЗї. ТєС№НЪѕт»ъ№¤ЧчЧ°ЦГµД¶ЇБ¦С§·ЦОцј°їШЦЖ[J]. ЦР№ъ№¤іМ»ъеѧ±Ё, 2007, 5(1): 72-74.
LIU Penghu, ZHANG Yong, ZHANG Qiang. Dynamical analysis and control for manipulator of hydraulic excavator[J]. Chinese Journal of Construction Machinery, 2007, 5(1): 72-74.
[13] єъРЫО°. ТєС№НЪѕт»ъ·ґІщЧ°ЦГµДБ¦С§РФДЬ·ЦОцУлУЕ»ЇСРѕї[D]. і¤Йі: ЦРДПґуС§»ъµз№¤іМС§Фє, 2009: 47-53.
HU Xiongwei. Analysis and optimization of the mechanical properties of hydraulic excavator backhoe device[D]. Changsha: Central South University, College of Mechanical and Electrical Engineering, 2009: 47-53.
[14] АоФЁІ©, єОЗе»Є, ХЕґуЗм. ТєС№НЪѕт»ъ№¤ЧчЧ°ЦГ¶ЇБ¦С§·ЦОцУл·ВХжСРѕї[J]. »ъґІУлТєС№, 2006(10): 170-171.
LI Yuanbo, HE Qinghua, ZHANG Daqing. Dynamic analysis and simulation with lagrange equation on hydraulic excavator[J]. Machine Tool & Hydraulics, 2006(10): 170-171.
[15] іВ№ъїЎ. ТєС№НЪѕт»ъ±аОЇ»б. ТєС№НЪѕт»ъ[M]. Одєє: »ЄЦРїЖјјґуС§іц°жЙз, 2011: 48-51.
CHEN Guojun. The editorial board of hydraulic excavator. hydraulic excavator[M]. Wuhan: Huazhong University of Science and Technology Press, 2011: 48-51.
[16] БЦДЅТе, К·ЗаВј. µҐ¶·ТєС№НЪѕт»ъ№№ФмУлЙијЖ[M]. ±±ѕ©: Т±Ѕр№¤Тµіц°жЙз, 2011: 35-36.
LIN Muyi, SHI Qinglu. Structure and design of single bucket hydraulic excavator[M]. Beijing: Metallurgical Industry Press, 2011: 35-36.
(±ај іВІУ»Є)
КХёеИХЖЪЈє2013-10-10Ј»РЮ»ШИХЖЪЈє2013-12-08
»щЅрПоДїЈє№ъјТЧФИ»їЖС§»щЅрЧКЦъПоДї(51246003Ј¬51274252)Ј»єюДПКЎЅМУэМьёЯµИѧУїЖС§СРѕїПоДї(12C0862)Ј»єюДПКЎёЯРЈґґРВЖЅМЁїЄ·Е»щЅрЧКЦъПоДї( 09K104)Ј»єюДПКЎёЯРЈїЖјјґґРВНЕ¶УЦ§іЦјЖ»®ПоДї(2012Дк)
НЁРЕЧчХЯЈєР¤ІЕФ¶(1979-)Ј¬ДРЈ¬№уЦЭНюДюИЛЈ¬ЅІК¦Ј¬ґУКВ»ъµзТ»Ме»ЇПµНі·ВХжАнВЫУл·Ѕ·ЁµДСРѕїЈ»µз»°Јє18229598077Ј»E-mailЈєxiaocaiyuan1999@sina.com

