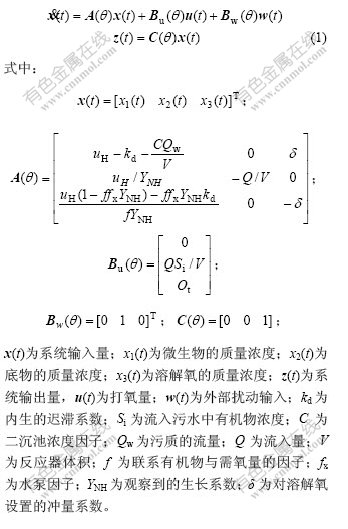
ЛюадЮлФрЮлЫЎДІРэЯЕЭГЕФзюгХТГАєHЁоБЃГЩБОПижЦ
аьЛЊ1, 2ЃЌбІКуаТ1ЃЌЭѕЪПЭЌ2
(1. ФЯОЉРэЙЄДѓбЇ ОМУЙмРэбЇдКЃЌНЫе ФЯОЉЃЌ210094ЃЛ
2. НФЯДѓбЇ аХЯЂЙЄГЬбЇдКЃЌНЫе ЮоЮ§ЃЌ214122)
еЊ вЊЃКеыЖдОпгаЭЙЖрУцЬхВЮЪ§ВЛШЗЖЈадЕФЮлЫЎДІРэПижЦЯЕЭГЃЌбаОПЦфТГАєHЁоБЃГЩБОПижЦЦїЕФЩшМЦЮЪЬтЁЃЪзЯШЃЌИјГіБфВЮЪ§ЛюадЮлФрЯЕЭГЕФзДЬЌПеМфФЃаЭЃЛШЛКѓЃЌНсКЯЖўДЮаЭадФмжИБъКЭHЁоадФмжИБъЃЌЕМГіЯЕЭГТГАєHЁоБЃГЩБОПижЦЦїДцдкЕФГфЗжЬѕМўвдМАЯргІЕФПижЦЦїЩшМЦЗНЗЈЃЌВЂЭЈЙ§ЯпадОиеѓВЛЕШЪНЃЌИјГіИУПижЦЦїдівцЕФПЩааНтЁЃвдФГЮлЫЎГЇЮлЫЎаджЪКЭДІРэФмСІЮЊР§ЃЌгІгУЫљЩшМЦЕФТГАєHЁоБЃГЩБОПижЦЦїНјааЗТецбаОПЁЃЗТецНсЙћБэУїЃКВЩгУИУЗНЗЈЪЙЯЕЭГзюжеЕФЮШЬЌЮѓВюНЯаЁЃЌжЄУїИУЗНЗЈЪЧПЩааКЭгааЇЕФЁЃ
ЙиМќДЪЃКЛюадЮлФрЯЕЭГЃЛЭЙЖрУцЬхВЮЪ§ВЛШЗЖЈадЃЛHЁоБЃГЩБОПижЦЃЛТГАєПижЦЃЛЯпадОиеѓВЛЕШЪН
жаЭМЗжРрКХЃКTP301 ЮФЯзБъжОТыЃКA ЮФеТБрКХЃК1672-7207(2010)03-1046-06
Optimal robust HЁо guaranteed cost control for activated sludge sewage treatment system
XU Hua1, 2, XUE Heng-xin1, WANG Shi-tong2
(1. School of Economics and Management, Nanjing University of Science and Technology, Nanjing 210094, China;
2. School of Information Engineering, Southern Yangtze University, Wuxi 214122, China)
Abstract: The problem of robust HЁо guaranteed cost controller design was studied for wastewater treatment control systems with polytopic uncertainties. Firstly, the state space model of activated sludge system with uncertain parameters was established. Then, combined with the quadratic performance index and HЁо performance index, a sufficient condition for the existence of robust HЁо guaranteed cost controller was derived and its design procedures were also given. Meanwhile, the controller gain was obtained by applying linear matrix inequality technique. Finally, take a wastewater treatment plant sewage treatment capacity of nature for example, and applying the design of robust HЁо guaranteed cost controller to simulate. The results show that the steady-state system has smaller error using the method, which proves the method is feasible and effective.
Key words: activated sludge system; polytypic uncertainties; HЁо guaranteed cost control; robust control; linear matrix inequality
ФПЧАЃЌЖдЙЄвЕЗЯЫЎКЭГЧЪаЮлЫЎДІРэЪБДѓЖрВЩгУЛюадЮлФрЗЈЁЃИУЗНЗЈЭЈЙ§РћгУздШЛНчжаЮЂЩњЮяЕФЩњУќЛюЖЏРДЧхГ§ЮлЫЎжагаЛњЮлШОЮяЃЌЦфЛљБОСїГЬМћЮФЯз[1]ЁЃЦфжаЃЌШмНтбѕХЈЖШЪЧОіЖЈЮлЫЎДІРэНјГЬжаЫЎжЪЕФЙиМќвђЫиЁЃШмНтбѕВЛзуЛђЙ§СПЖМЛсЕМжТЮлФрЩњДцЛЗОГЖёЛЏЃКШєШмНтбѕХЈЖШВЛзуЃЌдђЛсв§Ц№КУбѕОњЕФЩњГЄЫйТЪНЕЕЭЃЌДгЖјЪЙГіЫЎЫЎжЪЯТНЕЃЛЗДжЎЃЌШєШмНтбѕХЈЖШЙ§ИпЃЌдђЛсвђЮЊаѕФ§МСдтЕНЦЦЛЕЃЌЕМжТаќИЁЙЬЬхГСНЕадБфВюЃЌЭЌЪБЃЌдьГЩФмдДРЫЗб[2]ЁЃвђДЫЃЌдкећИіЗДгІЙ§ГЬжаЃЌашБЃГжШмНтбѕХЈЖШЮЊЪЪвЫжЕЁЃВЛШЗЖЈЯЕЭГЕФБЃГЩБОПижЦЮЪЬтзюдчЪЧгЩChangЕШ[3]ЬсГіЕФЃЌЫќдкТњзуЯЕЭГЮШЖЈЕФЭЌЪБЛЙФмЪЙЯЕЭГОпгаСМКУЕФадФмвЊЧѓЁЃТГАєПижЦЪЧ20ЪРМЭ90ФъДњГѕБЛЬсГіРДЕФвЛжжЩшМЦЗНЗЈЁЃТГАєадЪЧжИЯЕЭГЖдВЮЪ§дкЩшЖЈЗЖЮЇФкБфЛЏЕФВЛУєИаадЃЌМДЯЕЭГдкВЛШЗЖЈВЮЪ§БфЛЏШХЖЏЯТОпгаФГжжадФмжИБъВЛБфЕФФмСІЁЃHЁоТГАєПижЦЪЧаТЗЂеЙЕФЦЕгђФкзюгХПижЦРэ Тл[4-7]ЃЌYiЕШ[8-9]гІгУHЁоПижЦКЭІЬзлКЯПижЦЖМШЁЕУСЫКмКУЕФаЇЙћЁЃНќФъРДЃЌЫцзХВЛШЗЖЈЯЕЭГТГАєПижЦбаОПЕФЗЂеЙЃЌВЛШЗЖЈЯЕЭГЕФБЃГЩБОПижЦЮЪЬтв§Ц№СЫШЫУЧЕФЙуЗКЙизЂ[10-16]ЁЃЭЙЖрУцЬхВЛШЗЖЈЯЕЭГЪЧТГАєПижЦРэТлбаОПЕФвЛРрживЊЕФВЛШЗЖЈЯЕЭГЁЃШЛЖјЃЌетаЉНсЙћДѓЖрМЏжадкЖдЗЖЪ§гаНчВЛШЗЖЈадЕФбаОПЃЌЖјЖдЭЙЖрУцЬхВЛШЗЖЈЯЕЭГЕФбаОПНЯЩйЃЛДЫЭтЃЌвЛАуЕФЛюадЮлФрЯЕЭГЖМОпгаБфСПЖрЁЂОЋЖШВЛИпЁЂЫцЛњгАЯьвђЫиЖрЁЂЙ§ГЬВЛЮШЖЈЃЌЪЕЪБадВЛКУЕШВЛзуЃЌЫљвдЃЌФбвдЛёЕУТњвтЕФПижЦаЇЙћЁЃДЋЭГПижЦВпТдШчБШР§ПижЦЁЂPIDПижЦ[17]ЕШЃЌашвЊИљОнЫЎжЪЕФБфЛЏЧщПіЖдВЛЭЌЕФВЮЪ§НјааЕїећЃЌБШНЯЗБЫіЁЃЮЊДЫЃЌБОЮФзїепВЩгУHЁоБЃГЩБОЕФПижЦЗНЗЈЪЕЯжЖдЮлЫЎДІРэЙ§ГЬжаШмНтбѕХЈЖШЕФПижЦЁЃИУЛюадЮлФрЯЕЭГПЩГщЯѓЮЊвЛРрОпгаЭЙЖрУцЬхВЮЪ§ВЛШЗЖЈадЕФЯпадЯЕЭГЃЌЫљЩшМЦЕФПижЦЦїдкБЃжЄЯЕЭГОпгаБЃГЩБОадФмЕФЭЌЪБЛЙФмОпгавЛЖЈЕФHЁоИЩШХвжжЦЫЎЦНЁЃПижЦЦїдівцзюжеПЩЙщНсЮЊвЛзщЯпадОиеѓВЛЕШЪН(LMI)ЕФПЩааадЮЪЬт[18]ЃЌЧѓНтЪЎЗжЗНБуЃЌЧвЮоашВЮЪ§ЕїећЁЃ
1 ЯЕЭГФЃаЭУшЪі
ИљОнЮяСЯЦНКтдРэЃЌЖдЛюадЮлФрЗЈЮлЫЎДІРэЯЕЭГНјааШчЯТМйЩш[19-21]ЃК
(1) ЮЂЩњЮяЮЊЗЧздбјЮЂЩњЮяЃЌЦфЩњГЄТЪДѓгкЫРЭіТЪВЂТњзуMonodЗНГЬЃЛ
(2) ЖўГСГиЮоЩњЛЏЗДгІЗЂЩњЃЛ
(3) ЛиСїЮлФргАЯьФрСфКЭВњТЪЯЕЪ§ЃЛ
(4) жЛбаОПЯЕЭГЕФЯѕЛЏЗДгІЁЃ
гЩвдЩЯМйЩшЃЌПЩЕУЛюадЮлФрЮлЫЎДІРэЯЕЭГЕФзДЬЌЗНГЬЃК
ЗНГЬжаЦфгрИїЗћКХЕФЮяРэвтвхМћЮФЯз[19]ЁЃ
дкЩЯЪізДЬЌЗНГЬжаЃЌИїВЮЪ§ЕФШЁжЕгыЮлЫЎДІРэГЇЕФЪЕМЪЧщПігаЙиЃЌвђДЫЃЌОпгаКмДѓЕФВЛШЗЖЈадЁЃЮЊСЫВЛЪЇвЛАуадЃЌетРяМйЩшВЮЪ§БфЛЏЗЖЮЇШчЯТЃК
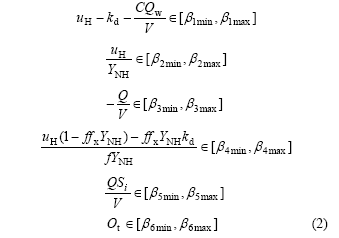
ІТiminКЭІТimax(i=1, 2, Ё, 6)ЗжБ№БэЪОЖдгІВЮЪ§ЕФЯТНчКЭЩЯНчЁЃ
зДЬЌЗНГЬ(1)УшЪіСЫвЛРрОпгаВЛШЗЖЈВЮЪ§ЕФЯпадЯЕЭГЃЌБОЮФеыЖдДЫРрЯЕЭГЃЌЩшМЦОпгаHЁоадФмжИБъЕФБЃГЩБОПижЦЦїЃЌЪЙЕУЯЕЭГТГАєНЅНќЮШЖЈЃЌЭЌЪБЛёЕУТњвтЕФПижЦаЇЙћЁЃ
2 HЁоБЃГЩБОПижЦЦїЩшМЦ
ПМТЧвЛРраЮШчЪН(1)ЕФВЛШЗЖЈЯпадЯЕЭГЃЌВЛЪЇвЛАуадЃЌСю
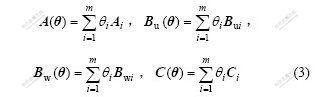
ЪНжаЃКІШ=[ІШ1ЃЌІШ2ЃЌЁЃЌІШm]TЃЌЮЊВЛШЗЖЈВЮЪ§ЯђСПЃЌЧвТњ
зу ЃЌ
ЃЌ ЃЌМДЯЕЭГ(1)ПЩБэЪОГЩОиеѓ
ЃЌМДЯЕЭГ(1)ПЩБэЪОГЩОиеѓ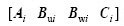 ЕФЭЙЖрУцЬхаЮЪНЃЛAiЃЌBuiЃЌBwiЃЌCi (i=1, 2, Ё, m)ЮЊОпгаЪЪЕБЮЌЪ§ЕФвбжЊГЃЪ§ОиеѓЁЃ
ЕФЭЙЖрУцЬхаЮЪНЃЛAiЃЌBuiЃЌBwiЃЌCi (i=1, 2, Ё, m)ЮЊОпгаЪЪЕБЮЌЪ§ЕФвбжЊГЃЪ§ОиеѓЁЃ
ЖдВЛШЗЖЈЯЕЭГ(1)ЃЌЖЈвхШчЯТаЮЪНЖўДЮаЭадФмжИБъЃК

ЪНжаЃКWКЭRЮЊИјЖЈЕФЖдГЦе§ЖЈМгШЈОиеѓЁЃ
ЙигкЯЕЭГЕФБЃГЩБОПижЦЃЌв§ШывдЯТЖЈвх[3]ЁЃ
ЖЈвх1 ЖдВЛШЗЖЈЯЕЭГ(1)КЭадФмжИБъ(4)ЃЌШчЙћДцдк1ИіПижЦТЩ КЭJ*1Иіе§Ъ§ЃЌЪЙЕУЖдЫљгадЪаэЕФВЛШЗЖЈадЃЌБеЛЗЯЕЭГЪЧТГАєНЅНќЮШЖЈЕФЃЌЧвБеЛЗадФмжИБъжЕТњзуJЁмJ*ЃЌдђJ*ГЦЮЊВЛШЗЖЈЯЕЭГ(1)ЕФ1ИіадФмЩЯНчЃЌ
КЭJ*1Иіе§Ъ§ЃЌЪЙЕУЖдЫљгадЪаэЕФВЛШЗЖЈадЃЌБеЛЗЯЕЭГЪЧТГАєНЅНќЮШЖЈЕФЃЌЧвБеЛЗадФмжИБъжЕТњзуJЁмJ*ЃЌдђJ*ГЦЮЊВЛШЗЖЈЯЕЭГ(1)ЕФ1ИіадФмЩЯНчЃЌ ГЦЮЊВЛШЗЖЈЯЕЭГ(1)ЕФ1ИіТГАєБЃГЩБОПижЦТЩЁЃ
ГЦЮЊВЛШЗЖЈЯЕЭГ(1)ЕФ1ИіТГАєБЃГЩБОПижЦТЩЁЃ
ЙигкЯЕЭГЕФHЁоПижЦдђЖЈвхШчЯТЁЃ
ЖЈвх2 ЖдВЛШЗЖЈЯЕЭГ(1)ЃЌИјЖЈИЩШХвжжЦЫЎЦН ІУ ЃО0ЃЌШєДцдк1ИіПижЦТЩЃЌЪЙЕУЖдЫљгаЕФИЩШХw(t)ЃЌБеЛЗЯЕЭГЪЧТГАєНЅНќЮШЖЈЕФЃЌЧвдкСуГѕЪМЬѕМўЯТЃЌЯЕЭГЪфГіТњзуЃК
 ЃМ
ЃМ
дђГЦЮЊВЛШЗЖЈЯЕЭГ(1)ЕФвЛИіHЁоПижЦТЩЁЃЦфжаЃК БэЪОЯђСПЕФEuclideanЗЖЪ§ЁЃ
БэЪОЯђСПЕФEuclideanЗЖЪ§ЁЃ
НЋЖЈвх1КЭЖЈвх2ЯрНсКЯЃЌПЩЕУЕНвдЯТЖЈвхЁЃ
ЖЈвх3 ЖдВЛШЗЖЈЯЕЭГ(1)ЃЌИјЖЈадФмжИБъ(4)КЭИЩШХвжжЦЫЎЦН ЃО0ЃЌШчЙћДцдкПижЦТЩЃЌЪЙЕУЖдЫљгадЪаэЕФВЛШЗЖЈадКЭИЩШХw(t)ЃЌБеЛЗЯЕЭГТњзуЖЈвх1КЭЖЈвх2ЃЌдђДЫЪБПижЦТЩОЭГЦЮЊВЛШЗЖЈЯЕЭГ(1)ЕФ1ИіТГАєHЁоБЃГЩБОПижЦТЩЁЃ
ЃО0ЃЌШчЙћДцдкПижЦТЩЃЌЪЙЕУЖдЫљгадЪаэЕФВЛШЗЖЈадКЭИЩШХw(t)ЃЌБеЛЗЯЕЭГТњзуЖЈвх1КЭЖЈвх2ЃЌдђДЫЪБПижЦТЩОЭГЦЮЊВЛШЗЖЈЯЕЭГ(1)ЕФ1ИіТГАєHЁоБЃГЩБОПижЦТЩЁЃ
ЯжЖдВЛШЗЖЈЯЕЭГ(1)ЃЌЩшМЦзДЬЌЗДРЁПижЦТЩ ЃЌдђБеЛЗЯЕЭГЮЊЃК
ЃЌдђБеЛЗЯЕЭГЮЊЃК

 (5)
(5)
ЪНжаЃК

ЖЈРэ1 ЖдВЛШЗЖЈЯЕЭГ(1)ЃЌИјЖЈадФмжИБъ(4)КЭИЩШХвжжЦЫЎЦНІУ ЃО0ЃЌШєДцдкЖдГЦе§ЖЈОиеѓPКЭОиеѓKЃЌЪЙЕУЖдЫљгадЪаэЕФВЛШЗЖЈадКЭИЩШХw(t)ЃЌЯТСаВЛЕШЪНГЩСЂЃК

 ЃМ0 (6)
ЃМ0 (6)
дђ ЃЌЪЧВЛШЗЖЈЯЕЭГ(1)ЕФ1ИіТГАєHЁоБЃГЩБОПижЦТЩЁЃЯргІЕиЃЌ1ИіЯЕЭГадФмЩЯНчЪЧ
ЃЌЪЧВЛШЗЖЈЯЕЭГ(1)ЕФ1ИіТГАєHЁоБЃГЩБОПижЦТЩЁЃЯргІЕиЃЌ1ИіЯЕЭГадФмЩЯНчЪЧ ЁЃЦфжаЃК
ЁЃЦфжаЃК ЮЊЯЕЭГЕФГѕЪМзДЬЌЁЃ
ЮЊЯЕЭГЕФГѕЪМзДЬЌЁЃ
жЄУї МйЖЈДцдкЖдГЦе§ЖЈОиеѓPКЭОиеѓKЃЌЪЙЕУВЛЕШЪН(6)ГЩСЂЁЃбЁШЁLyapunovКЏЪ§ЃК

гЩОиеѓPЕФе§ЖЈадПЩжЊЃК ЃО0ЁЃбиБеЛЗЯЕЭГ(5)ЕФШЮвтЙьЯпЃЌЙигкЪБМфЕФЕМЪ§ЮЊЃК
ЃО0ЁЃбиБеЛЗЯЕЭГ(5)ЕФШЮвтЙьЯпЃЌЙигкЪБМфЕФЕМЪ§ЮЊЃК





ИљОнЬѕМў(6)ЃЌЩЯЪНБфЮЊЃК


 (7)
(7)
ЕБ ЪБЃЌгЩЪН(7)ЕУЕНЃК
ЪБЃЌгЩЪН(7)ЕУЕНЃК
 (8)
(8)
ИљОнLyapunovЮШЖЈадРэТлЃЌБеЛЗЯЕЭГ(5)ЪЧТГАєНЅНќЮШЖЈЕФЁЃ
ЖдЪН(8)СНБпДгt=0ЕН Л§ЗжЃЌВЂРћгУЯЕЭГЕФНЅНќЮШЖЈадЃЌЕУЃК
Л§ЗжЃЌВЂРћгУЯЕЭГЕФНЅНќЮШЖЈадЃЌЕУЃК

ИљОнЖЈвх1ЃЌЪЧВЛШЗЖЈЯЕЭГ(1)ЕФ1ИіТГАєБЃГЩБОПижЦТЩЃЌЧв ЃЌЪЧЯргІБеЛЗадФмжИБъЕФ1ИіЩЯНчЁЃ
ЃЌЪЧЯргІБеЛЗадФмжИБъЕФ1ИіЩЯНчЁЃ
ЕБ ЪБЃЌв§ШыШчЯТжИБъЃК
ЪБЃЌв§ШыШчЯТжИБъЃК

дђдкСуГѕЪМЬѕМўЯТЃЌгЩЪН(7)ПЩЕУЖдЫљгаЗЧСуИЩШХw(t)ЃЌЯТЪНГЩСЂЃК
 Ём
Ём ЃМ
ЃМ
 ЃМ0
ЃМ0
МДТњзуЖЈвх2жаЕФЬѕМўЁЃвђДЫЃЌгжЪЧВЛШЗЖЈЯЕЭГ(1)ЕФ1ИіHЁоПижЦТЩЁЃ
злЩЯЫљЪіЃЌЪЧВЛШЗЖЈЯЕЭГ(1)ЕФ1ИіТГАєHЁоБЃГЩБОПижЦТЩЁЃ[жЄБЯ]
зЂЃКЖЈРэ1жаЕУЕНЕФадФмЩЯНчвРРЕгкЯЕЭГЕФГѕЪМзДЬЌx0ЁЃЖјдкЪЕМЪЯЕЭГжаЃЌЯЕЭГЕФГѕЪМзДЬЌгаЪБКмФбОЋШЗШЗЖЈЁЃЮЊДЫЃЌПЩвдМйЖЈГѕЪМзДЬЌx0ЪЧ1ИіТњзу ЕФСуОљжЕЫцЛњБфСПЁЃЭЈЙ§ПМТЧадФмжИБъЕФЦкЭћжЕЃЌЕУЕНвдЯТНсЙћЃК
ЕФСуОљжЕЫцЛњБфСПЁЃЭЈЙ§ПМТЧадФмжИБъЕФЦкЭћжЕЃЌЕУЕНвдЯТНсЙћЃК
 Ём
Ём (9)
(9)
ЮЊСЫЕУЕНПижЦЦїЕФЙЙдьЗНЗЈЃЌЖдгквдЯТЛљгкЯпадОиеѓВЛЕШЪНДІРэ[7]ЗНЗЈЃЌБОЮФИјГіЯЕЭГHЁоБЃГЩБОПижЦТЩЕФЩшМЦВНжшЁЃ
ЖЈРэ2 ЖдВЛШЗЖЈЯЕЭГ(1)ЃЌИјЖЈадФмжИБъ(4)КЭИЩШХвжжЦЫЎЦНЃО0ЃЌДцдкЖдГЦе§ЖЈОиеѓPКЭОиеѓKЃЌЪЙЕУЖдЫљгадЪаэЕФВЛШЗЖЈадКЭИЩШХw(t)ЃЌВЛЕШЪН(6)ГЩСЂЕБЧвНіЕБДцдкЖдГЦе§ЖЈОиеѓXКЭОиеѓYЃЌЪЙЕУ
 (10)
(10)
ЦфжаЃКi=1, 2, Ё, mЃЛ ЪЧВЛШЗЖЈЯЕЭГ(1)ЕФ1ИіТГАєHЁоБЃГЩБОПижЦТЩЃЌЯргІЕиЃЌЯЕЭГадФмЩЯНчЪЧ
ЪЧВЛШЗЖЈЯЕЭГ(1)ЕФ1ИіТГАєHЁоБЃГЩБОПижЦТЩЃЌЯргІЕиЃЌЯЕЭГадФмЩЯНчЪЧ ЁЃ
ЁЃ
жЄУї гЩЪН(6)ЕУЃК

НЋЯЕЭГВЮЪ§(3)ДњШыЩЯЪНЃЌЕУЃК

ЖдЩЯЪНСНБпзѓГЫКЭгвГЫЖдНЧОиеѓ ЃЌВЂСю
ЃЌВЂСю ЃЌ
ЃЌ ЃЌдђЩЯЪНБфЮЊЃК
ЃЌдђЩЯЪНБфЮЊЃК

гІгУОиеѓЕФSchurВЙаджЪ[22]ЃЌМДПЩгЩЩЯЪНЕУЕНЯпадОиеѓВЛЕШЪН(10)ЁЃ[жЄБЯ]
дкЖЈРэ2ЕФЛљДЁЩЯЃЌЛЙПЩНјвЛВНИјГізюгХБЃГЩБОПижЦТЩМАзюаЁШХЖЏвжжЦЖШІУЕФЧѓНтЗНЗЈЁЃ
ЖЈРэ3 ЖдВЛШЗЖЈЯЕЭГ(1)ЃЌИјЖЈадФмжИБъ(4)КЭИЩШХвжжЦЫЎЦНЃО0ЃЌШєвдЯТгХЛЏЮЪЬтЃК
 (11)
(11)
s.t. (1) 
(2) 
гаНт( )ЃЌдђ
)ЃЌдђ ЪЧЯЕЭГЕФзюгХБЃГЩБОПижЦТЩЁЃ
ЪЧЯЕЭГЕФзюгХБЃГЩБОПижЦТЩЁЃ
жЄУї гЩОиеѓЕФSchurВЙаджЪМАЖЈРэ3жаЕФЬѕМў(2)ПЩжЊЃК ЃЌМДTrace(M)ЕФзюаЁЛЏБЃжЄСЫTrace(X-1)ЕФзюаЁЛЏЁЃ
ЃЌМДTrace(M)ЕФзюаЁЛЏБЃжЄСЫTrace(X-1)ЕФзюаЁЛЏЁЃ
ЖЈРэ4 ЖдВЛШЗЖЈЯЕЭГ(1)ЃЌИјЖЈадФмжИБъ(4)ЃЌШєСю ЃЌдђзюгХHЁоПижЦТЩПЩвдЭЈЙ§НЈСЂКЭЧѓНтвдЯТгХЛЏЮЪЬтЕУЕНЃК
ЃЌдђзюгХHЁоПижЦТЩПЩвдЭЈЙ§НЈСЂКЭЧѓНтвдЯТгХЛЏЮЪЬтЕУЕНЃК
 (12)
(12)
s.t.
ЯргІЕФзюаЁШХЖЏвжжЦЖШ ЁЃ
ЁЃ
жЄУї вдЩЯ2ИігХЛЏЮЪЬтОљПЩЭЈЙ§MatlabжаЕФmincx( )КЏЪ§ЧѓНтЕУЕНЁЃ
3 Ъ§зжЗТецбаОП
ИљОнФГЮлЫЎГЇЮлЫЎаджЪКЭДІРэФмСІЃЌИјЖЈИУЮлЫЎГЇИїВЮЪ§ЕФЩЯЯТНчжЕЗжБ№ШчЯТ[20]ЃК
 ЃЛ
ЃЛ
 ЃЛ
ЃЛ
 ЃЛ
ЃЛ
 ЃЛ
ЃЛ
 ЃЛ
ЃЛ
 ЁЃ
ЁЃ
ГхСПЯЕЪ§ШЁжЕКуЮЊ1ЃЌдђ
 ЃЛ
ЃЛ ЃЛ
ЃЛ
 ЃЛ
ЃЛ ЃЛ
ЃЛ
 ЃЛ
ЃЛ
 ЃЛ
ЃЛ
 ЃЛ
ЃЛ ЁЃ
ЁЃ
ИјЖЈ ЃЌ
ЃЌ ЃЌ
ЃЌ ЃЌЧѓНтЯпадОиеѓВЛЕШЪН(10)ЃЌЕУЕНзДЬЌЗДРЁПижЦЦїдівцЮЊЃК
ЃЌЧѓНтЯпадОиеѓВЛЕШЪН(10)ЃЌЕУЕНзДЬЌЗДРЁПижЦЦїдівцЮЊЃК
 (13)
(13)
ЯргІЕФЯЕЭГадФмжИБъЩЯНчЮЊ ЁЃНјвЛВНЧѓНтгХЛЏЮЪЬт(11)ЃЌЕУЕНЯЕЭГадФмжИБъЕФзюгХЩЯНч
ЁЃНјвЛВНЧѓНтгХЛЏЮЪЬт(11)ЃЌЕУЕНЯЕЭГадФмжИБъЕФзюгХЩЯНч ЁЃСэЭтЃЌгЩгХЛЏЮЪЬт(12)ЛЙПЩЕУЕНЯЕЭГОпгаЕФзюаЁHЁоШХЖЏвжжЦЫЎЦНЮЊ
ЁЃСэЭтЃЌгЩгХЛЏЮЪЬт(12)ЛЙПЩЕУЕНЯЕЭГОпгаЕФзюаЁHЁоШХЖЏвжжЦЫЎЦНЮЊ ЁЃ
ЁЃ
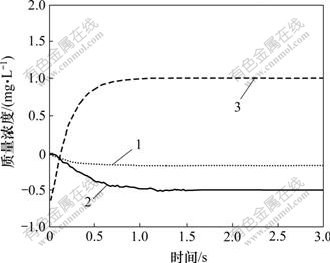
МйЖЈЭтНчИЩШХw(t)ЮЊдк[-1, 1]ФкБфЛЏЕФЫцЛњЪ§ЃЌВЂЧвдк1.5 sКѓИЩШХЯћЪЇЁЃНЋЩшМЦЕФзДЬЌЗДРЁПижЦЦї(13)гІгУгкЯЕЭГ(1)НјааЗТецЪдбщЃЌЪЙЕУЯЕЭГШмНтбѕЕФжЪСПХЈЖШx3(t)БЃГждк1 mg/LЃЌЗТецНсЙћШчЭМ1КЭЭМ2ЫљЪОЁЃЦфжаЃКЭМ1ЫљЪОЮЊПижЦЦїзїгУгкЯТНчФЃаЭЪБЕФПижЦЪфГіаЇЙћЃЌЭМ2ЫљЪОЮЊПижЦЦїзїгУгкЩЯНчФЃаЭЪБЕФПижЦЪфГіаЇЙћЁЃ
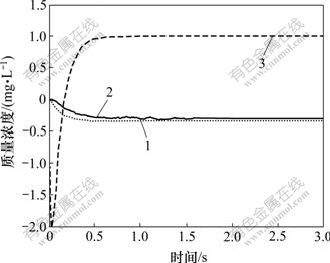
1ЁЊЮЂЩњЮяЃЛ2ЁЊЕзЮяЃЛ3ЁЊШмНтбѕ
ЭМ1 ПижЦЦїзїгУгкЯТНчФЃаЭЪБЕФзДЬЌЯьгІ
Fig.1 State responses of controller role model in lower bound of state response
1ЁЊЮЂЩњЮяЃЛ2ЁЊЕзЮяЃЛ3ЁЊШмНтбѕ
ЭМ2 ПижЦЦїзїгУгкЩЯНчФЃаЭЪБЕФзДЬЌЯьгІ
Fig.2 State responses of controller role model in sector on state response
гЩЭМ1КЭЭМ2ПЩжЊЃКЫљЩшМЦЕФПижЦЦїФмЙЛКмКУЕиПижЦЯЕЭГШмНтбѕЕФжЪСПХЈЖШЃЌЪЙЦфЮЌГждкЦкЭћЕФИјЖЈжЕЃЛЭЌЪБЃЌЫљЩшМЦЕФПижЦЦїЖдИЩШХЛЙОпгаКмЧПЕФТГАєадЁЃЭЈЙ§гыЮФЯз[23]КЭ[24]жаPIDЗНЗЈНјааЖдБШЃЌПЩжЊБОЮФЕФЗТецНсЙћВЛНіЕїНкЪБМфЖЬЃЌЯьгІЫйЖШПьЃЌЖјЧвОпгаНЯКУЕФЮШЖЈПижЦаЇЙћЁЃ
4 НсТл
еыЖдФПЧАЮлЫЎДІРэЙ§ГЬПижЦжаДцдкЕФШБЕуЃЌЙщФЩГіБфВЮЪ§ЛюадЮлФрЯЕЭГзДЬЌПеМфФЃаЭЃЌВЂЖдЯЕЭГЮШЖЈадНјааЗжЮіЁЃРћгУзДЬЌЗДРЁЗНЗЈИФЩЦЯЕЭГЕФЖЏЬЌадФмЃЌЬсГіСЫвЛжжТГАєHЁоБЃГЩБОПижЦЦїЕФЗНЗЈЁЃЗТецбаОПБэУїЃЌЪЕбщНсЙћгыЯжгаЕФЖЈадЗжЮіНсТлЯрЗћЃЌЧвОпгавдЯТгХЕуЃК
(1) гІгУИУЗНЗЈПЩвдЛёЕУТњвтЕФПижЦаЇЙћЃЛ
(2) ПЩЪЙЯЕЭГОпгаКмКУЕФТГАєадЃЛ
(3) БЃжЄЯЕЭГПьЫйЯьгІЃЌЧвГЌЕїНЯаЁЃЛ
(4) ОпгаКмКУЕФЪЕгУМлжЕЁЃ
ВЮПМЮФЯзЃК
[1] бІИЃЯМ, СѕдиЮФ, Эѕе§Ящ, ЕШ. ФЃК§ПижЦММЪѕдкЮлЫЎДІРэЯЕЭГЕФгІгУ[J]. ББОЉЙЄЩЬДѓбЇбЇБЈ: здШЛПЦбЇАц, 2005, 23(6): 24-27.
XUE Fu-xia, LIU Zai-wen, WANG Zheng-xiang, et al. Fuzzy control technology in the sewage treatment system[J]. Beijing Technology and Business University: Natural Science Edition, 2005, 23(6): 24-27.
[2] СѕГЌБђ, ЧЧПЁЗЩ, еХЗМЗМ. ЮлЫЎДІРэЙ§ГЬжаШмНтбѕЕФФЃК§ЩёОЭјТчПижЦ[J]. ЩНЖЋДѓбЇбЇБЈ: ЙЄбЇАц, 2005, 35(3): 83-87.
LIU Chao-bin, QIAO Jun-fei, ZHANG Fang-fang. Sewage dissolved oxygen in the process of the fuzzy neural network control[J]. Journal of Shandong University: Engineering Edition, 2005, 35(3): 83-87.
[3] Chang M S L, Peng T K C. Adaptive guaranteed cost control of systems with uncertain parameters[J]. IEEE Trans Automatic Control, 1972, 17(4): 474-483.
[4] ЮтаёЖЋ, НтбЇЪщ. HЁоТГАєПижЦжаЕФМгШЈеѓбЁдё[J]. ЧхЛЊДѓбЇбЇБЈ: здШЛПЦбЇАц, 1997, 37(1): 27-30.
WU Xu-dong; XIE Xue-shu. Weighting function matrix selection in HЁо robust control[J]. Journal of Tsinghua University: Natural Science, 1997, 37(1): 27-30.
[5] РюШКУї, жьСц, аье№. ДХаќИЁЧђЕФТГАєПижЦЦїЩшМЦ[J]. жаФЯДѓбЇбЇБЈ: здШЛПЦбЇАц, 2007, 38(5): 922-927.
LI Qun-ming, ZHU Ling, XU Zhen. Magnetic ball robust controller design[J]. Journal of Central South University: Science and Technology, 2007, 38(5): 922-927.
[6] ЮтУє, Й№ЮРЛЊ. ЯжДњТГАєПижЦ[M]. ГЄЩГ: жаФЯЙЄвЕДѓбЇГіАцЩч, 1998.
WU Ming, GUI Wei-hua. Modern robust control[M]. Changsha: Central South University of Technology Press, 1998.
[7] Й№ЮРЛЊ, СѕБЬгё. вЛРрВЛШЗЖЈЪБжЭЙиСЊЗЧЯпадЯЕЭГЗжЩЂТГАєHЁоПижЦ[J]. жаФЯДѓбЇбЇБЈ: здШЛПЦбЇАц, 2005, 36(5): 846-851.
GUI Wei-hua, LIU Bi-yu. Decentralized robust HЁо control for a class of uncertain interconnected nonlinear systems with time delays[J]. Journal of Central South University: Science and Technology, 2005, 36(5): 846-851.
[8] Yi J H, Park K H, Kim S H, et al. Robust force control for a magnetically levitated manipulator using flux density measurement[J]. Control Engineering Practice, 1996, 4(7): 957-965.
[9] Uchiyama Y, Mukai M, Fujita M. Robust acceleration control of electrodynamic shaker using ІЬЈCsynthesis[C]//Proceedings of the 44th IEEE Conference on Decision and Control. Seville, 2005: 6170-6175.
[10] Fishman A, Dion J M, Dugard L, et al. A linear matrix inequality approach for guaranteed cost control[C]//Proceedings of the 13th IFAC World Congress. San Francisco, 1996: 197-202
[11] Petersen, I.R. Guaranteed cost LQG control of uncertain linear systems[C]//Proceedings of 23rd IEEE Conference on Decision and Control. San Antonio, TX, 1993: 15-17.
[12] JIANG Pei-gang, SU Hong-ye, CHU Jian. LMI approach to optimal guaranteed cost control for a class of linear uncertain discrete systems[C]//Proceedings of the American Control Conference. Chicago, 2000: 327-331.
[13] Glielmo L, Kogan M M. Guaranteed cost controllers for a class of uncertain linear systems[C]//The 2nd International Conference on Control of Oscillations and Chaos.St Petersburg, 2000: 140-141
[14] СѕсЏЗу, КњИе. БЃГЩБОПижЦЕФбаОПЯжзД[J]. З№ЩНПЦбЇММЪѕбЇдКбЇБЈ: здШЛПЦбЇАц, 2003, 21(4): 26-30.
LIU Ceng-feng, HU Gang. Guaranteed cost control of the status quo[J]. Foshan Science and Technology University: Natural Science, 2003, 21(4): 26-30.
[15] Dan Huang, Sing K N. State feedback guaranteed cost control of uncertain networked control systems[C]//1st International Symposium on Systems and Control in Aerospace and Astronautics. Harbin, 2006: 19-21.
[16] XU Jian-ming, YU Li. An LMI approach to guaranteed cost PI control of linear uncertain systems[C]//43rd IEEE Conference on Decision and Control. Nassau,2004: 2165-2170.
[17] Stephen C, Paschall Ђђ. Design, fabrication, and control of a single actuator magnetic levitation system[D]. Texas: Department of Mechanical Engineering, Texas A&M University, 2002.
[18] Boyd S, EI L Ghaoui, Feron E, et al. Linear matrix inequalities in system and control theory[M]. Philadelphia: SIAM, 1994.
[19] Sanchez E N, Gonzalez J M, Ramirez E. Minimal PD fuzzy control of a wastewater treatment plant[C]//Proceedings of the 15th IEEE International Symposium on Intelligent Control. Rio Patras, Greece, 2000: 169-173
[20] ЗыдЃюШ, СњЬкШё, ЙљОЂЫЩ, ЕШ. БфВЮЪ§ЛюадЮлФрЯЕЭГЕФзюгХТГАєПижЦЗЈ[J]. жаЙњИјЫЎХХЫЎ, 2003, 19(3): 14-16.
FENG Yu-zhao, LONG Teng-rui, GUO Jing-song, et al. Variable parameters activated sludge system, robust control of the optimal method [J]. China Water & Wastewater, 2003, 19(3): 14-16.
[21] БЯбЉЧл, Фпд, ЭѕРіОъ. ЛюадЮлФрЫЎДІРэФЃК§ПижЦЯЕЭГЩшМЦМАЗТец[J]. ЮїАВЙЄвЕДѓбЇбЇБЈ, 2007, 27(6): 551-554.
BI Xue-qin, NI Yang, WANG Li-juan. Activated sludge treatment fuzzy control system design and simulation[J]. XiЁЏan University of Technology Journal, 2007, 27(6): 551-554.
[22] гсСЂ. ТГАєПижЦЁЊЁЊЯпадОиеѓВЛЕШЪНДІРэЗНЗЈ[M]. ББОЉ: ЧхЛЊДѓбЇГіАцЩч, 2002: 12-30.
YU Li. Robust control: LMI approach[M]. Beijing: Tsinghua University Press, 2002: 12-30.
[23] ЗЖГЬЛЊ, жьЮф. ЮлЫЎЩњЛЏДІРэжаШмНтбѕЕФЗЧЯпадПижЦбаОП[J]. ЙЄвЕПижЦгыгІгУ, 2008, 27(2): 22-23.
FAN Chen-hua, ZHU Wu. Biological wastewater treatment in the non-linear control of dissolved oxygen[J]. Industrial Control and Application, 2008, 27(2): 22-23.
[24] АВРЄ, СјДКЦН, УЋНЈЖЋ. бѕЛЏЙЕЯЕЭГжаШмНтбѕжЧФмПижЦЯЕЭГЕФбаОП[J]. жаББДѓбЇбЇБЈ: здШЛПЦбЇАц, 2006, 27(6): 504-705.
AN Kun, LIU Chun-ping, MAO Jian-dong. Oxidation ditch system dissolved oxygen study of intelligent control systems[J]. North University of China: Natural Science Edition, 2006, 27(6): 504-705.
ЪеИхШеЦкЃК2009-04-06ЃЛаоЛиШеЦкЃК2009-06-21
ЛљН№ЯюФПЃКЙњМвИпММЪѕбаОПЗЂеЙМЦЛЎ(ЁА863ЁБМЦЛЎ)ЯюФП(2007AA1Z158)ЃЛНФЯДѓбЇЧрФъЛљН№зЪжњЯюФП(2008LQN028)
ЭЈаХзїепЃКаьЛЊ(1978-)ЃЌХЎЃЌНЫеЮоЮ§ШЫЃЌВЉЪПбаОПЩњЃЌНВЪІЃЌДгЪТЛЗОГЮлШОЁЂШЫЙЄжЧФмЁЂФЃК§ЯЕЭГКЭЙмРэаХЯЂЯЕЭГЕШбаОПЃЛЕчЛАЃК13921520420ЃЛE-mail: joanxh2003@163.com
(БрМ ГТВгЛЊ)

