加力压桩液压系统的动力学建模与仿真
周 旭,何清华,朱建新,贺湘宇
(中南大学 机电工程学院,湖南 长沙,410083)
摘 要:为了便于对液压静力压桩机进行改进,介绍准恒功率液压静力压桩机的结构、工作原理、压桩过程,以及建立准恒功率液压静力加力压桩系统动力学模型的相关理论。分析准恒功率液压静力加力压桩过程,利用AMESim仿真平台建立准恒功率液压静力加力压桩系统的动力学模型,设置模型中的主要参数进行动力学仿真,并分析动力学仿真结果。仿真结果表明:增大升降油缸活塞直径,能减小压桩机加力压桩时的机身速度,增大压桩机加力压桩时的加速度;增大升降油缸活塞的初始高度,能减小压桩机加力压桩时的机身速度和加速度;降低压桩机升降油缸活塞的初始高度,或增大压桩机升降油缸活塞直径,均能减小压桩机加力压桩时压桩机的机身位移。
关键词:液压静力压桩机;油缸;建模;仿真;AMESim
中图分类号:TU67; TP39 文献标识码:A 文章编号:1672-7207(2008)02-0322-05
Dynamics modeling and simulation of hydraulic stem of pile driving under adding force
ZHOU Xu, HE Qing-hua, ZHU Jian-xin, HE Xiang-yu
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: To improve hydraulic static pile diver, the framework, working principle, process of pile driving of hydraulic static pile diver with quasi-constant-power and the pertinent theory of building the dynamics model of the hydraulic system of pile driving under adding force were introduced. The process of pile driving under adding force of hydraulic static pile diver with quasi-constant-power was analyzed. The hydraulic system of pile driving under adding force was modeled in AMESim, and the main parameters of the model of the hydraulic system were set. The dynamics simulation of the hydraulic system was achieved, and the simulation results were analyzed. The simulation results show that augmenting the piston diameter of lift cylinder reduces the velocity and adds to the acceleration of the platform of hydraulic static pile diver in the process of hydraulic static pile driving under adding force. Augmenting the initial displacement of piston of lift cylinder reduces the velocity and acceleration of the platform of hydraulic static pile diver. Reducing the initial displacement of piston of lift cylinder, or augmenting the piston diameter of lift cylinder, will reduce the displacement of the platform of hydraulic static pile driver.
Key words: hydraulic static pile driver; cylinder; modeling; simulation; AMESim
全液压静力压桩机是利用高压油产生的强大静压力,平稳、安静地将预制桩快速压入地基的一种新型桩基机械,已广泛用于我国许多城市,特别是沿海城市建设和旧城改造的桩基施工[1]。
全液压静力压桩机的压桩工作机理[2]:静压预制桩主要用于软土地基,当预制桩在垂直静压力作用下压入土中时,桩周围土体发生急速而激烈的挤压,土中孔隙水压力急剧上升,土的抗剪强度大大降低,这时桩身很容易往下压,压桩的阻力主要来自桩尖向下穿透土体时直接冲剪桩端土体的阻力,压桩阻力并不一定随桩的入土深度的增加而累计增大,而是随着桩尖处土体的软硬程度等因素,即随着桩尖处土体的抗冲剪阻力的变化而变化,这说明此时桩侧摩擦阻力非常小,但这是一种暂时的现象。一旦压桩终止,随着时间的推移,桩周土体中孔隙水压力逐渐消散,土体发生固结,土的抗剪强度也可随桩侧摩擦力逐渐恢复和提高,从而使静压预制桩获得较大的承载力,在某些土体固结系数较高的软弱地基,静压预制桩获得单桩极限承载力可比最终压桩力高出2~3倍。
准恒功率液压压桩系统在液压静力压桩机中得到了较广泛的应用;准恒功率液压加力压桩时压桩机机身由4个升降液压油缸支撑,且4个升降液压油缸的进油管道已关闭;由于压桩速度小,压桩力较大,压桩力与4个升降液压油缸高度产生相互影响,压桩机机身位移、速度、加速度会随压桩油缸和4个升降液压油缸活塞直径和升降油缸活塞的初始高度、直径产生变化。人们对液压静力压桩机液压系统的设计原理、控制和应用研究较多[3-8],而对液压静力压桩机液压系统的仿真研究较少[9-10],特别是对加力压桩的升降油缸进行仿真研究更少。AMESim仿真软件能实现多学科的机械、液压、气动、热、电和磁等领域的建模和仿真,仿真范围广,不同领域的模块之间可直接进行物理连接[11]。为了便于对液压静力压桩机进行改进和加快压桩进程,本文作者采用AMESim仿真软件对液压静力加力压桩系统进行分析、建模和仿真研究。
1 液压加力压桩简介
全液压静力压桩机静压预制桩的施工,采用分段压入、逐段接长的方法。压桩过程为[12]:测量定位、压桩机就位、吊桩、喂桩、桩身对中调直、压桩、接桩、再压桩、送桩、终止压桩、截(接)桩头。
全液压静力压桩机的结构如图1所示,包括边桩器、主驾驶室、压桩台、夹桩箱、起重机、升降机械等。
应用准恒功率设计理论的压桩液压系统,根据实际压桩过程低阻力阶段时间较长,且要求有较高的压桩速度;高阻力阶段速度较低,且要求有较高的压桩力(对应为高压桩油压)的特点和要求,利用变量泵或恒功率泵低压大流量、高压小流量的变量特性,使压桩过程两个阶段的功率消耗基本一致,从而达到压桩过程的准恒功率匹配[13]。
准恒功率压桩液压系统的压桩油缸分为主、副2对油缸,依据压桩机的型号不同,压桩油缸缸径也不同。
压桩液压系统利用主、副2对压桩液压油缸先后参与压桩,即低阻力阶段由1对主压桩液压油缸进行压桩,适应低阻力、高速度的要求;到了高阻力阶段另一对副压桩液压油缸同时参与压桩(此时的压桩过程称为加力压桩),进行加力压桩,以适应低速度、高压桩力的要求,直至达到设计的最终压桩力。由此保证了压桩机在整个压桩过程中有很高的功率利用率。系统分阶段接近于恒功率运转,解决了传统液压静力压桩机功率利用率低、液压系统可靠性差及使用寿命短的问题[14]。
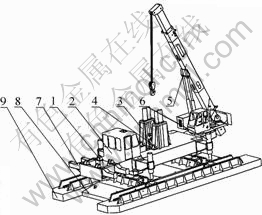
1―边桩器;2―主驾驶室;3―压桩台;4―夹桩箱;5―起重机;6―升降机械;7―辅助配重梁;8―横移回转机构;9―纵移机构
图1 压桩机整体结构
Fig.1 Structure of hydraulic static pile diver
2 加力压桩液压系统的建模
本文的仿真对象是湖南山河智能机械股份有限公司生产的ZYJ800型液压静力压桩机。主要对压桩机加力压桩的升降油缸进行分析和仿真。
2.1 动力学建模的相关理论
在液压静力加力压桩系统的建模过程中,对非对称压桩油缸的处理主要基于液压缸的连续性方程和液压缸与负载的力平衡方程[15]。即:
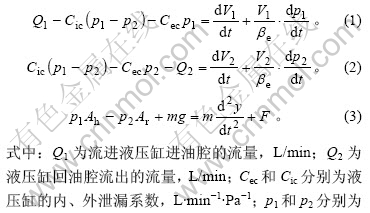
式中:Q1为流进液压缸进油腔的流量,L/min;Q2为液压缸回油腔流出的流量,L/min;Cec和Cic分别为液压缸的内、外泄漏系数,L?min-1?Pa-1;p1和p2分别为液压缸进油腔、回油腔的压力,Pa;βe为有效体积弹性模数(包括液体、混入油中的空气以及工作腔体的机械柔度),Pa;V1为液压缸进油腔容积(包括阀、连接管道和进油腔的体积),cm3;V2为回油腔体积(包括阀、连接管和回油腔的体积),cm3;t为仿真时间,min;Ah为活塞头端面积,cm2;Ar为活塞杆侧活塞的作用面积,cm2;m为活塞和负载的总质量,kg;y为活塞杆位移;m;F为作用在活塞上的外负载,N。
在对液压静力加力压桩系统进行建模的过程中,对4个升降非对称液压油缸的处理主要基于液体的体积弹性模数,该值反映液体抵抗压缩能力[16]。进行加力压桩时,由于压桩速度小,压桩力较大,压桩力的较大变化引起4个升降液压缸的压力的较大变化,从而会产生相互影响。
升降液压缸的液体的体积增量?V随压力增量?p的变化为:

2.2 加力压桩仿真模型的建立
仿真的压桩机是湖南山河智能机械股份有限公司生产的800 t液压静力压桩机,其压桩能力可达800 t。根据液压控制回路原理建立了该液压静力压桩机的简化力学模型。压桩机与土体相互作用,构成了一个非线性动力系统。
在AMESim软件中仿真时,系统所有模型均被参数化[17],如对于液压缸,从其缸径、活塞杆径、行程、缸两端的非工作腔的体积、粘滞摩擦因数等,到其所用液压油类型,都以参数的形式输入。其他的元件都有其详细的参数,在这里仅就关键的参数加以列举。本文在仿真过程中根据实际的物理模型尺寸和由试验得出的经验数据输入以上参数。简单列举如下:油液的体积弹性模数βe为1.7×109 Pa;压桩油缸的物理参数根据实物如下:缸径320 mm;杆径230 mm;行程2 m;缸两端的非工作腔的体积分别为1.7×104 cm3和8×103 cm3;而其他的仿真模型的参数如粘滞摩擦因数、液压缸末端的弹性刚度、阻尼系数及其末端的变形量,比较难以确定,则使用系统推荐的经验 值,分别为1 N/(mm?s-1),1.0×104 N/mm,10 N/(mm?s-1)和1 μm,泄漏系数为800 L/(min?Pa);升降液压油 缸的物理参数根据实物如下:缸径360 mm;杆径 280 mm;行程1.2 m;活塞的初始高度0.55 m;其余仿真模型的参数是由试验得出的经验数据,与压桩油缸的参数相同。压桩台和负载的总质量为18 t;机身的总质量为802 t;泵的参数按其实际参数输入。
在所有参数中最难确定的是压桩阻力的输入,压桩阻力随时间变化太大,且无规律;而压桩阻力随压桩深度变化,且有规律可循;本文输入压桩阻力是现场做的静压桩阻力随压桩深度的变化值。压桩过程开始时压桩台的质量与机身的总质量分开,分别进入压桩系统和升降系统;为了仿真一个压桩行程,压桩系统和升降系统用力和位移进行关联,最终所得到的仿真界面如图2所示。
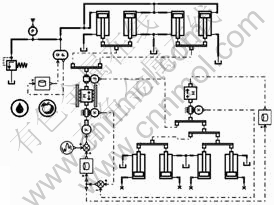
图2 液压静力加力压桩系统的AMESim仿真模型
Fig.2 Simulating model of hydraulic system of pile driving under adding force of hydraulic static pile divers in AMESim
3 液压系统的动力学仿真与分析
3.1 液压系统的动力学仿真
对液压静力压桩系统进行动力学仿真,由液压静力压桩机的工作特点可知,当压桩机工作时,对压桩液压系统进行动力学仿真属于一维运动。
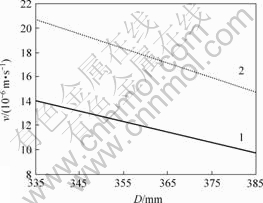
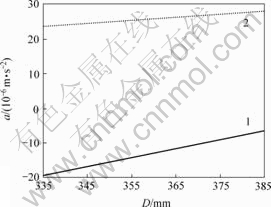
在进行液压静力压桩系统动力学仿真时,升降油缸的活塞初始高度和活塞直径设为全局参数,并同时设为输入参数;升降油缸的活塞初始高度设定为0.55 m,可从0.25 m变化到0.85 m;升降油缸的活塞直径设定为360 mm,可从310 mm变化到410 mm。在加力压桩工况下,活塞初始高度与活塞直径对机身位移的影响交互作用如图3所示。其中:实线1表示当升降油缸活塞直径D从小往大改变,同时升降油缸活塞的初始高度H较低的时候,压桩机机身位移s的变化;虚线2表示当升降油缸活塞直径从小往大改变,同时升降油缸活塞的初始高度较高的时候,压桩机机身位移的变化。机身位移随活塞初始高度变化如图4所示;活塞初始高度与活塞直径对机身速度影响交互作用如图5所示。活塞初始高度与活塞直径对机身加速度影响交互作用如图6所示。表1所示为机身位移随活塞初始高度和活塞直径的变化仿真值。
3.2 液压系统的动力学仿真结果分析
应用AMESim 软件可以较为简便地对液压静力加力压桩系统进行仿真。
在图5和图6中,线1与线2不平行,可知升降油缸活塞的初始高度与升降油缸活塞直径对压桩机机身速度、加速度的影响有交互作用,互相影响;当升降油缸活塞的初始高度从低往高改变时,压桩机机身速度、加速度的变化取决于升降油缸活塞直径。当升降油缸活塞直径从低往高改变时,压桩机机身速度变小,加速度增大。当升降油缸活塞的初始高度从低往高变化时,压桩机机身速度、加速度变小。
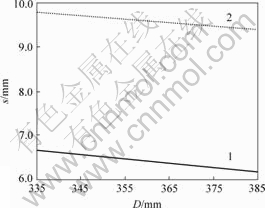
1―H较低;2―H较高
图3 活塞初始高度与活塞直径对机身位移影响的交互作用图
Fig.3 Interaction between initial displacement of piston and piston diameter of lift cylinder regarding displacement of platform
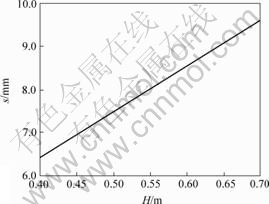
图4 机身位移随活塞初始高度变化图
Fig.4 Displacement of platform vs initial displacement of piston in lift cylinder
1―H较低;2―H较高
图5 活塞初始高度与活塞直径对机身速度影响的交互作用图
Fig.5 Interaction between initial displacement of piston and piston diameter of lift cylinder regarding velocity of platform
1―H较低;2―H较高
图6 活塞初始高度与活塞直径对机身加速度影响的交互作用图
Fig.6 Interaction between initial displacement of piston and piston diameter of lift cylinder regarding acceleration of platform
表1 机身位移随活塞初始高度和活塞直径的变化仿真值
Table 1 Displacement of platform vs initial displacement of piston and piston diameter of lift cylinder

在图3中,线1与线2基本平行,可知升降油缸活塞的初始高度与升降油缸活塞直径对压桩机机身位移的影响没有交互作用,不互相影响。
由图3及表1可知,升降油缸活塞直径由大到小改变时,压桩机机身位移增大。
由图4及表1可知,升降油缸活塞的初始高度从低往高改变时,压桩机机身位移增大。
4 结 论
a. 升降油缸活塞的初始高度、升降油缸活塞直径对压桩机加力压桩时机身位移、速度、加速度有影响。
b. 升降油缸活塞的初始高度、升降油缸活塞直径对压桩机加力压桩时机身速度、加速度影响有交互作用,是相互影响的;而对压桩机加力压桩时机身位移的影响没有交互作用,不互相影响。
c. 当升降油缸活塞直径从小往大改变时,压桩机加力压桩时机身速度变小、加速度增大。当升降油缸活塞的初始高度从低往高变化时,压桩机加力压桩时机身速度、加速度变小。
d. 降低升降油缸活塞的初始高度或增大升降油缸活塞直径,压桩机加力压桩时机身位移减少。
参考文献:
[1] 夏卿坤, 汪大鹏, 吴宪平, 等. QYZ600型全液压静力压桩机及其液压系统的设计[J]. 机电产品开发与创新, 2003(4): 47-48, 51.
XIA Qing-kun, WANG Dai-peng, WU Xian-ping, et al. Design of QYZ600 hydrostatic pile driving machine and the hydraulic system[J]. Development & Innovation of Machinery & Electrical Products, 2003(4): 47-48, 51.
[2] 夏卿坤, 刘 磊, 谢立辉, 等. 全液压静力压桩机及其液压系统的设计[J]. 水利电力机械, 2003, 25(6): 28-30.
XIA Qing-kun, LIU Lei, XIE Li-hui, et al. Design of the hydrostatic static pneumatic pilling machine and its hydraulic system[J]. Water Conservancy & Electric Power Machinery, 2003, 25(6): 28-30.
[3] 郭 勇, 龚艳玲, 何清华, 等. 全液压静力压桩机压桩进程控制[J]. 建筑机械, 2002(4): 52-54.
GUO Yong, GONG Yan-ling, HE Qing-hua, et al. Control on piling course of hydrostatic pile driving machine[J]. Construction Machinery, 2002(4): 52-54.
[4] 朱建新, 何清华, 郭 勇. 液压静力压桩机液压控制系统设计[J]. 工程机械, 1999, 30(7): 21-25.
ZHU Jian-xing, HE Qing-hua, GUO Yong. Design of the hydraulic control system of hydrostatic pile driving machine[J]. Construction Machinery and Equipment, 1999, 30(7): 21-25.
[5] 朱桂华, 胡均平, 罗春雷. 静压桩机优化多挡压桩速度的液压系统设计[J]. 建筑机械, 2003(5): 40-42.
ZHU Gui-hua, HU Jun-ping, LUO Chun-lei. Study and design of hydraulic system for static pile-pressing machine with optimum multiple pile pressing speed[J]. Construction Machinery, 2003(5): 40-42.
[6] 胡均平, 刘兴农, 罗春雷, 等. 液压起重机过载保护系统的设计[J]. 中南大学学报: 自然科学版, 2005, 36(5): 841-845.
HU Jun-ping, LIU Xing-nong, LUO Chun-lei, et al. Design of over-load protecting system for hydraulic crane[J]. Journal of Central South University: Science and Technology, 2005, 36(5): 841-845.
[7] 冯立杰. 静压力压桩机工作原理及在城市建设中的应用[J]. 液压与气动, 2003(7): 33-35.
FENG Li-jie. The principium of the during-press-peg machine and utilization in the civic construction[J]. Chinese Hydraulics & Pneumatics, 2003(7): 33-35.
[8] 蔡 正, 谢旭时, 郭金基, 等. 液压桩机动力系统的分析及其应用[J]. 机械开发, 2000(2): 1-4.
CAI Zheng, XIE Xu-shi, GUO Jin-gi, et al. Analysis and application of the power system of hydraulic pile divers[J]. Machine Development, 2000(2): 1-4.
[9] 胡均平, 李建强. 液压振动压桩系统的仿真研究[J]. 矿冶工程, 2003, 23(1): 65-66, 69.
HU Jun-ping, LI Jian-qiang. Simulation of hydraulic vibration pile-driving system―A study[J]. Mining and Metallurgical Engineering, 2003, 23(1): 65-66, 69.
[10] 蔡绍琚. 静力压桩机液压冲击回路及其数学的模型[J]. 建筑机械化, 1990(3): 21-24.
CAI Shao-ju. Hydraulic impact loop and mathematic model of hydrostatic pile driving machine[J]. Construction Mechanization, 1990(3): 21-24.
[11] 何清华, 张大庆, 郝 鹏, 等. 液压挖掘机工作装置仿真研究[J]. 系统仿真学报, 2006, 18(3): 735-738, 746.
HE Qing-hua, ZHANG Da-qing, HAO Peng, et al. Study on motion simulation of hydraulic excavator’s manipulator[J]. Journal of System Simulation, 2006, 18(3): 735-738, 746.
[12] 胡均平, 王凌辉, 刘 伟, 等. 抱压式静力压桩斜桩原因及解决办法[J]. 建筑机械化, 2004, 25(9): 26-27.
HU Jun-ping, WANG Ling-hui, LIU Wei, et al. Reasons and solutions about lean of piles in hydraulic pile driver working[J]. Construction Mechanization, 2004, 25(9): 26-27.
[13] 朱建新, 何清华, 郭 勇. 准恒功率设计方法在液压静力压桩机中应用[J]. 中南工业大学学报: 自然科学版, 1999, 30(2): 198-201.
ZHU Jian-xin, HE Qing-hua, GUO Yong. Application of quasi-constant-power design method in hydrostatic pile driver[J]. Journal of Central South University of Technology: Natural Science, 1999, 30(2): 198-201.
[14] 何清华, 朱建新, 郭 勇, 等. 液压静力压桩机的高效节能研究[J]. 岩土钻凿工程, 1995(3): 11-16.
HE Qing-hua, ZHU Jian-xing, GUO Yong, et al. Research on the energy-saving technology of hydrostatic pile driving machine[J]. Geotechnical Drilling Engineering, 1995(3): 11-16.
[15] 李洪人. 液压控制系统[M]. 北京: 国防工业出版社, 1981: 58-60.
LI Hong-ren. Hydraulic control system[M]. Beijing: National Defence Industry Press, 1981: 58-60.
[16] 沈兴全, 吴秀玲. 液压传动与控制[M]. 北京: 国防工业出版社, 2005: 6-7.
SHEN Xing-quan, WU Xiu-ling. Fluid drive and control[M]. Beijing: National Defence Industry Press, 2005: 6-7.
[17] 付永领, 祁晓野, 李 庆. AMESim系统建模和仿真―― 从入门到精通[M]. 北京: 航空航天大学出版社, 2006: 1-3.
FU Yong-ling, QI Xiao-ye, LI Qing. Modeling and simulation of system in AMESim―from entrance to mastery[M]. Beijing: Beijing University of Aeronautics and Astronautics Press, 2006: 1-3.
收稿日期:2007-07-23;修回日期:2007-09-06
基金项目:国家“863”计划项目(2003AA430200)
通信作者: 周 旭(1964-),男,湖南湘潭人,博士研究生,高级工程师,从事工程机械液压传动及机电液集中控制研究;电话:0731-8836046;E-mail: xuzhouzx@163.com

