

DOI: 10.11817/j.issn.1672-7207.2021.04.014
下肢柔性助力外衣的工效学设计与步态预测
张雷雨1,贺彦东1,李剑锋1,苏鹏2,陶春静2,季润2,董明杰1
(1. 北京工业大学 先进制造技术北京市重点实验室,北京,100124;
2. 国家康复辅具研究中心,北京,100176)
摘要:为增强人体的下肢运动机能,研制一套柔性功能外衣,作为助力系统的末端执行元件包覆于人体下肢,对髋关节的前屈动作助力,并研发基于力位混合控制的外接驱动系统,初步完成下肢柔性助力外衣系统样机的搭建。在此基础上,提出以IMU为主导的自适应步态检测算法,检测频率自适应于人体运动速度,实现步态信息的高效检测,并以检测信息为基础,提出“牛顿+三次指数平滑”预测算法,实时预测人体下肢动作。研究结果表明:功能外衣具有较高的刚度和良好的穿戴舒适性,符合功能外衣的设计要求;“牛顿+三次指数平滑”预测算法可实时预测50 ms之后的髋关节角度,预测过程稳定,在人体行走过程中,预测曲线平滑性较好,精度较高,可满足助力系统的步态预测要求,为下肢助力研究提供依据。
关键词:下肢助力;功能外衣;髋关节前屈;自适应步态检测;步态预测
中图分类号:TP24 文献标志码:A 开放科学(资源服务)标识码(OSID)
文章编号:1672-7207(2021)04-1171-14
Ergonomic design of flexible lower limb assist Exosuit and gait prediction
ZHANG Leiyu1, HE Yandong1, LI Jianfeng1, SU Peng2, TAO Chunjing2, JI Run2, DONG Mingjie1
(1. Beijing Key Laboratory of Advanced Manufacturing Technology, Beijing University of Technology, Beijing 100124, China;
2. National Research Center for Rehabilitation Technical Aids, Beijing 100176, China)
Abstract: In order to enhance the motor function of the lower limbs, a flexible and functional Exosuit was developed, which covered the lower limbs of the human body and was used as the terminal effector of the assist system which assisted the flexion of the hip joint. At the same time, an external drive system with force position hybrid control was developed, and the prototype of the flexible lower limb assist Exosuit was preliminarily built. Based on IMU, an adaptive gait detection algorithm was proposed, and the detection frequency was adaptive to the speed of human movement to realize efficient detection of gait information. According to the detected information, the prediction algorithm of "Newton+triple exponential smoothing" was proposed to predict human lower limbs movements in real time. The results show that the functional Exosuit has high stiffness and good wear comfort, and it meets the design requirements of the functional Exosuit. Moreover, "Newton+triple exponential smoothing" prediction algorithm can predict the hip angle after 50 ms in real time and the forecasting process is stable, and the prediction curve is smooth and accurate during human walking, which meets the requirement of gait prediction and lays a partial foundation for the study of lower limb assist.
Key words: lower limb assist; functional Exosuit; hip flexion; adaptive gait detection; gait prediction
人体增强是机器人技术的重要分支,主要研究可穿戴机器人在降低能耗、延缓疲劳、提高人体速度等方面的性能。近年来,用于降低人体下肢运动消耗的下肢可穿戴机器人发展迅速,但人体经过生物进化和自我适应,具备了较优的节能运动模式,因此,如何实现穿戴舒适性与代谢降低的有效统一仍是一项艰巨的任务。下肢可穿戴机器人根据本体材料不同,可分为下肢机械外骨骼康复助力机器人和下肢柔性康复助力机器人。传统的下肢机械外骨骼康复助力机器人模仿人类下肢结构,以刚性材料为机械本体,由人体穿戴并随人体运动,针对运动障碍患者可为其提供步态辅助[1-2],针对健康人群可为其提供行走助力或负载助力[3-4],降低人体的能量消耗,如美国加州大学的BLEEX助力外骨骼[5]。尽管下肢机械外骨骼康复助力机器人的相关技术已经较为成熟,但由于其机械本体为刚性结构,人机相容性较差[6],而且由于穿戴误差的影响,可穿戴外骨骼的关节轴线相对于人体关节轴线易发生位置偏离[7],造成人体穿戴的不舒适性,增加人体附加的代谢消耗,甚至损伤人体关节。因此,为了减轻下肢机械外骨骼助力机器人对人体的附加影响,下肢柔性康复助力机器人逐步成为当前的研究热点。
下肢柔性康复助力机器人从人因工程学角度出发,以人体为支撑,将柔性材料(布带、气动肌肉等)作为驱动构件,包覆在肢体表面,为相应关节的运动提供辅助力,降低人体的代谢消耗。KIM等[8]设计了一种基于柔性外衣的下肢助力装置Exosuit,该装置不含任何刚性结构,以人体下肢作为支撑,将外衣本体包覆在穿戴者下肢表面,牵引单元固定在人体腰部,通过控制钢丝绳的伸缩对穿戴者髋关节的后伸动作助力。实验证明,当穿戴者在跑步机上以1.5 m/s的速度行走和2.5 m/s的速度慢跑时,助力装置Exosuit可分别降低9.3%和4.0%的人体代谢消耗。PARK等[9]设计了一种基于气动肌肉的主动柔性踝足矫形装置,支撑构件采用软塑料和复合材料,可向踝足部位提供缓变作用力,提高踝关节和脚掌的灵活性。JOHN等[10]研制了交叉线助力服,可单独控制的4根鲍登线相互交叉沿大腿前后两侧分布,为髋关节前屈/后伸、内收/外展及旋内/旋外提供辅助力。综上可知,与下肢机械外骨骼助力机器人相比,下肢柔性康复助力机器人的装置本体多为柔性材料,刚性连杆和机械关节较少,质量小,刚度小,无需人机关节轴线精确对齐,增强了助力过程中的穿戴舒适性,而且在发生紧急情况时,柔性本体允许穿戴者进行紧急避险操作,安全系数高。
下肢柔性康复助力机器人属于典型的人机耦合系统,由于其柔性本体的特性,需以穿戴者为助力机器人的控制核心,通过感知系统和预测系统感知分析穿戴者的动作参数,控制驱动元件动作,实现下肢柔性康复助力机器人的助力功能。因此,下肢运动学信息的准确检测和实时预测是下肢柔性康复助力机器人的研究重点。下肢运动学信息检测内容主要包括关节角度、角速度以及足底压力等,可采用姿态感知、力感知和表面肌电技术进行检测。将IMU分别固定在腰、大腿、小腿和脚部等部位[11-12],测量髋/膝/踝关节的角度、角速度及加速度,同时,在脚后跟或脚尖等处放置F-Scan单元或压力传感器(LC)[13-14],测量脚掌与地面间支撑反力及压力分布,结合下肢的关节角度和峰值特征,辨识下肢运动相位。此外,还可利用基于EMG的表面肌电技术,通过附着在肌肉表面的肌电传感器,检测待助力关节相关肌肉群的活动程度,对不同步态模式进行识别和分类[15-17]。基于步态信息的检测数据,步态预测算法可实时预测穿戴者的运动状态,为助力过程提供保障。JOO等[18]开发了人工神经网络预测模型,该模型基于鞋垫式足底压力装置的测量数据,预测站立相和摆动相的步态特征。MARTINEZ-HERNANDEZ等[19]利用下肢运动学数据,采用自适应贝叶斯预测算法,通过不断完善自身预测精度和决策时间,识别步行活动和预测未来步态。MOISSENET等[20]将步态周期的特征点作为预测因子,将步行速度、性别、年龄及体重指数作为回归系数,通过多元回归模型,预测完整周期内关节角度曲线。综上所述,现有步态预测算法的计算量大,实时性较低,而针对助力功能的预测算法实时性要求较高,故需提高步态预测算法的实时性和精度,以适应不同速度下的下肢助力运动。
基于上述研究,下肢柔性康复助力机器人凭借轻便的装置本体和良好的穿戴舒适性,已逐步成为当前下肢可穿戴机器人的研究热点。本文作者研制一套功能外衣本体,设计助力系统的控制单元和牵引单元,编写步态检测和步态预测算法,初步搭建下肢柔性助力外衣系统样机,在此基础上,研究步态预测算法的预测性能。
1 下肢柔性助力外衣系统的设计
下肢柔性助力外衣系统主要包括功能外衣和外接驱动系统。功能外衣集成外衣本体、惯性传感器(IMU)、拉力传感器和鲍登线等,外衣本体主要包括尼龙材料制成的腰部环带和左右腿环带,腰部环带固定于人体腰部,左右腿环带固定于人体大腿,环带上设置有锚点,用于固定鲍登线和拉力传感器,此外,在人体腰部和左右大腿处分别配备惯性传感器,以实时检测人体的髋关节角度信息。外接驱动系统包含控制单元和牵引单元,控制单元以单片机为控制核心,基于采集的下肢步态和力学信号,控制牵引单元执行相应动作,牵引单元包含2个线性滑台,以鲍登线为传递介质,向功能外衣施加辅助力轮廓曲线,通过牵引和释放钢丝绳,实现对髋关节前屈动作的助力,如图1所示。
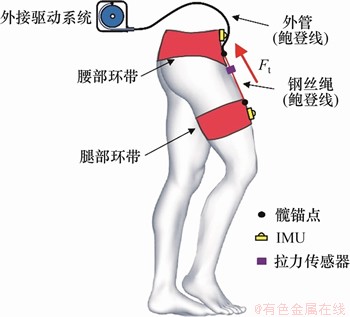
图1 髋关节前屈助力示意图
Fig. 1 Diagram of assist of hip flexion
1.1 助力关节选择
人体下肢主要由髋、膝及踝关节组成,在行走过程中,下肢活动主要由髋、膝及踝关节的运动复合而成,且以髋关节屈曲/伸展、膝关节屈曲/伸展及踝关节趾屈/背伸为主[21-22]。在运动过程中,各关节需要不同的生物关节力矩和运动范围,根据WINTER等[23]的研究成果,体质量为80 kg的人体在步速1.25 m/s下的下肢各关节运动学信息和生物峰值力矩如表1所示。
表1 人体下肢的运动学信息
Table 1 Kinematic information of human lower limbs

由表1可以看出:髋、踝关节产生的生物力矩峰值是膝关节的3倍左右,而膝关节的运动范围约为髋、踝关节的2.5倍,髋、踝关节在行走运动中具有承受力矩大、运动范围小的特征,因此,可将髋、踝关节作为下肢助力的助力关节。另一方面,由于柔性助力外衣的本体结构为柔性材料,需选择人体自身刚度较大且皮肤较少的部分作为辅助力传递的末端指向部分,优化柔性助力外衣的本体结构和辅助力传递路径,实现对髋、踝关节的助力。基于上述分析,下肢柔性助力外衣选择人体的骨盆结构作为辅助力传递的末端指向部分,当以髋关节为助力关节时,外衣本体仅需跨过髋关节和骨盆结构,外衣本体结构较为简单,在对髋关节助力时,对其他关节影响较小,而以踝关节为助力关节时,外衣本体需跨过髋关节、膝关节、踝关节以及骨盆结构,外衣本体结构较为复杂,在对踝关节助力时,容易对其他关节造成影响。因此,选择髋关节为助力关节。
髋关节是人体最大的关节,可简化为3自由度球副,在空间上具有全方位的定位功能,髋关节运动可描述为沿坐标系{Oh}的Xh,Yh和Zh方向的转动,分别实现前屈/后伸、内收/外展和内旋/外旋运动,如图2所示。
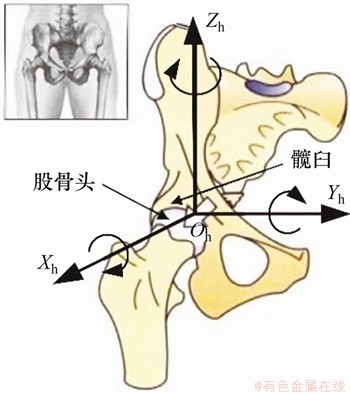
图2 髋关节转动自由度
Fig. 2 Freedom of hip joint
研究表明,在自然步态行走时,髋关节的内收/外展、内/外旋运动主要起辅助平衡与调整方向的作用,运动角度较小(<5°)且能量代谢消耗较低,髋关节的生物力矩峰值出现在前屈/后伸阶段,且前屈/后伸的运动角度较大。在做前屈运动时,髋关节需克服下肢重力向上抬升,关节峰值力矩最大。因此,拟将髋关节前屈运动作为助力对象,在人体腰部和腿部固定若干锚点,分别固定鲍登线的线管和钢丝绳,在髋关节前屈运动时牵引钢丝绳,在后伸运动时快速释放钢丝绳,实现对髋关节前屈动作的助力。
1.2 功能外衣
1.2.1 髋锚点的位置优选
髋锚点包括腰部锚点和腿部锚点,分别固定在腰部环带和腿部环带。腰部锚点用于固定鲍登线的外管,腿部锚点用于固定鲍登线的钢丝绳,当外界驱动系统牵引钢丝绳时,可形成方向沿腿部锚点指向腰部锚点的辅助力,从而形成对髋关节的辅助力力矩,对髋关节前屈动作助力。因此,为保证助力过程的高效平稳以及穿戴者助力过程的舒适性,以辅助力力矩和力矩曲线的平滑程度作为目标函数,求解人体行走过程中不同髋锚点位置对应的辅助力力矩,通过对比判断辅助力力矩和力矩曲线的平滑性,寻找最优的髋锚点位置。
基于上述分析,以人体髋关节为坐标原点O,建立如图3所示的平面直角坐标系,对人体下肢进行建模。图3中,P为腰部锚点,固连在人体腰部;Q为腿部锚点,固连在人体腿部,辅助力Ft的方向与矢量QP的方向保持一致;Qx为人体正常站立时,腿部锚点Q在x轴上的投影点,如图3(a)所示,由于在行走过程中,髋关节在竖直方向的位移较小,因此,可利用矢量QxQ方向变化来表示髋关节的转角θ,同时,定义髋关节后伸阶段的转角θ为负,前屈阶段的转角θ为正,如图3(b)和3(c)所示。矢量OR与矢量QP垂直,其大小即为辅助力的力臂。
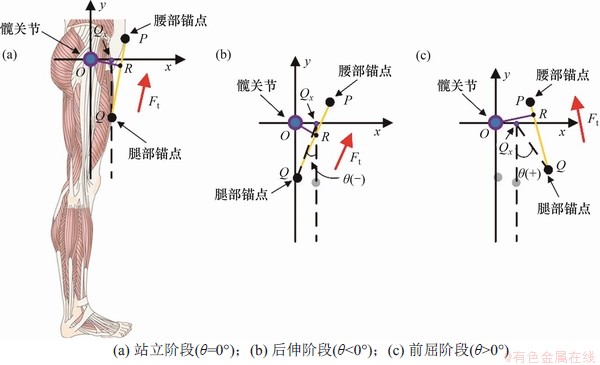
图3 人体下肢简化模型
Fig. 3 Simplified model of human lower limbs
在行走过程中,假设人体上半身保持直立,则腰部锚点P的位置矢量OP取决于腰部锚点P与髋关节竖直方向的距离以及人体的腰部厚度Tw,且为常量。由于腰部锚点P固定在腰部环带,其位置的变化范围较小,故通过对比测量不同人体穿戴腰部环带时的行走姿态,将腰部锚点P固定在髋关节上方5 cm处。另一方面,腿部锚点Q固定于腿部环带,其与髋关节的理论距离介于零到髋、膝关节的长度Lhk之间,位置变化范围较大。由上述分析可知,矢量QxQ的方向变化与髋关节的转角θ一致,QxQ大小即为腿部锚点Q距离髋关节的距离Lah,因此,腿部锚点Q的位置矢量OQ和矢量QP可分别表示为:
 (1)
(1)
 (2)
(2)
式中:矢量OQx的方向与x轴的正向保持一致,其大小取决于人体的大腿直径d。
基于上述分析,矢量OR与矢量QP垂直,其大小即为辅助力的力臂。由于下肢柔性助力外衣系统的外接驱动系统输出的辅助力为恒力,因此,可通过求解辅助力力臂的变化,来间接反映辅助力力矩的变化特性,结合图3所示的人体下肢模型,得到矢量OR的表达式为
 (3)
(3)
为保证髋锚点位置设计的有效性和适用性,通过查阅资料[24]和实际测量结果(男,26岁,身高180 cm,体质量为75 kg),得到人体行走过程中的肢体参数如表2所示。
表2 人体行走过程中的肢体参数
Table 2 Body parameters in the process of walking

将人体行走过程中的肢体参数代入式(2)和(3),利用MATLAB软件求解得到人体行走过程中,不同的腿部锚点位置对应的辅助力力臂如图4所示。从图4可见:当腿部锚点Q与髋关节的距离Lah大于等于20 cm时,相同髋关节角度对应的辅助力力臂大小基本保持一致,而且辅助力力臂的变化曲线较为平稳;另一方面,为了提高助力过程中钢丝绳的伺服性能,腿部锚点Q与髋关节的距离Lah不宜过大,因此,将腿部锚点Q固定在髋关节下方20 cm处。综上,腰部锚点P固定在髋关节上方5 cm处,腿部锚点Q固定在髋关节下方20 cm处。
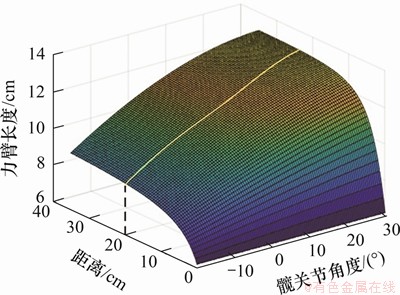
图4 不同状态下的辅助力力臂
Fig. 4 Auxiliary force arm in different states
1.2.2 功能外衣的实物设计
功能外衣的设计应遵循人体下肢的生理结构,尽可能降低对人体下肢关节灵活度的约束,最大程度地为下肢运动提供助力。为了增强功能外衣的穿戴舒适性,采用外表面较为粗糙且具有弹性的外衣作为基体,与下肢皮肤表面紧密贴合,增加功能外衣与下肢的摩擦力,减小助力过程中功能外衣与皮肤之间的位置偏移。在此基础上,制作韧性较强的开口环,包覆于外衣外侧面,分别固定于腰部和大腿,开口环采用尼龙材料且形状与腰和大腿的外形吻合,利用魔术贴将开口环拉紧封闭。为了固定鲍登线的外管和钢丝绳,基于上述关于髋锚点位置的优选,针对右腿在腰环带和右腿环带分别设置锚点A和C,在锚点A处固定复合材料的布带,在布带末端设置锚点B;将鲍登线外管末端固定于锚点B,在布带中部串联拉力传感器(ZNLBS-VII),以采集辅助力。将钢丝绳末端固定于锚点C,牵引单元通过钢丝绳施加辅助力F1,其方向由锚点C指向锚点B。同理,在腰环带和左腿环带设置锚点D,E和F,用于施加辅助力F2,其方向由锚点F指向锚点E。为了采集下肢步态信息,将2个IMU(LPMS-IG1)分别固定于左、右腿环带。为了采集的准确性,在人体腰环带的前侧位置附加固定1个基准IMU(LPMS-IG1),通过采集相对于基准IMU的姿态数据,实时检测髋关节的角度变化,以用于下肢步态预测。腿部IMU仅采集下肢运动平面的运动角度,运动平面平行于人体矢状面。为了提高腰环带的抗拉性能,设计了2条交叉肩带。
为了尽可能减少附加质量对穿戴者代谢消耗的影响,功能外衣尽可能轻便且主要质量应分布于腰部。本文的功能外衣整体质量约为995 g,其中分布于腰部的质量为800 g,腿部质量为195 g,男性测试者(年龄26岁,身高180 cm,体质量75 kg)穿戴功能外衣,如图5所示。通过实际测试,功能外衣对人体正常动作的影响较小,不会给穿戴者带来额外负担,具有良好的穿戴舒适性,符合功能外衣的设计要求。

图5 功能外衣本体
Fig. 5 Functional Exosuit
1.3 外接驱动系统
外接驱动系统包含牵引单元和控制单元。牵引单元包含2个线性滑台,以伺服电机(SM0601,MOONS,中国)为驱动核心,线性滑台以同步带为传动方式,伺服电机驱动带轮转动,带轮带动同步带和滑块(两者固定在一起)沿导轨水平往复运动,驱动原理及实物图如图6所示。鲍登线的钢丝绳与滑块右侧连接,外管与牵引单元的基体连接,同时,利用拉线式位移传感器实时采集滑块的运动位置,并传输到控制单元,为助力过程提供位置控制参数。牵引单元最大速度为1.5 m/s,最大拉力为100 N,最大行程为250 mm。
控制单元包括PC机显示界面和控制模块,通过将采集的力矩、位置信息作为控制参数,驱动牵引单元执行相应动作,实现基于力位混合控制的外接驱动系统的研发。PC机显示界面采用Visual Studio软件进行开发,运行于Windows系统。可通过串口与单片机控制模块进行通信,实现数据的接受处理和指令发送,并以图像或数字的形式实时显示单片机的反馈信息,实现人机交互。控制模块以单片机(STM32F4)为控制核心,一方面可向PC机实时反馈IMU、拉线式传感器和力矩传感器等外设的采集数据,另一方面用于接收PC机的控制指令,驱动控制牵引单元执行相应位置动作,实现对人体髋关节前屈动作的助力。
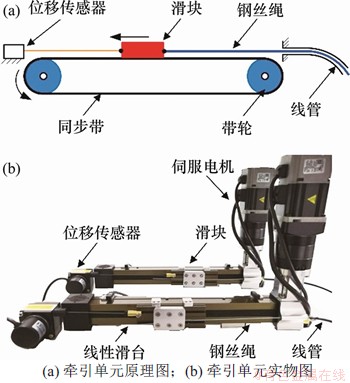
图6 牵引单元示意图
Fig. 6 Diagram of traction unit
基于上述分析,初步搭建的下肢柔性助力外衣系统样机如图7所示,穿戴者穿戴功能外衣,在水平放置的跑步机上运动,外接驱动系统集成在一个四层结构的移动小车上,以鲍登线为介质,与功能外衣相连,通过外接驱动系统对功能外衣的驱动控制,实现对穿戴者髋关节前屈动作的助力。
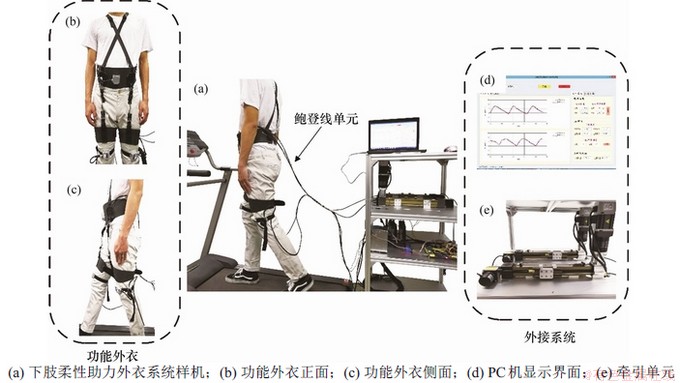
图7 下肢柔性助力外衣系统样机
Fig. 7 Prototype of flexible lower limb assist Exosuit
2 自适应步态检测算法
下肢柔性助力外衣系统属于典型的人机耦合系统,需以人体当前的步态信息为控制参数,实时预测人体的动作意图,从而控制牵引单元动作,实现对髋关节前屈动作助力。因此,作为助力过程的开端,步态检测性能的优劣直接影响助力过程的优劣。基于上述分析,利用腰部和腿部的IMU实时检测髋关节的角度,并提出一种自适应步态检测算法,可针对不同的运动速度自适应改变采样频率f,保证步态周期T内的采样点个数N,实现步态信息的有效检测。
自适应步态检测算法的核心是实时分析接收的髋关节角度序列,寻找髋关节角度序列的极值点,通过计算步态周期T的变化,动态改变采样频率f,以适应行走和奔跑下不同运动速度的步态信息检测。处理器接收的髋关节角度,会被存储在特定的缓存数组中,当处理器接收到新的角度时,处理器会以当前角度为基准,对前m个角度进行比较,得到最大值,并判断该数据是否同时大于前后相近的数据,若满足,则该值为第i个步态周期Ti的极大值,并记录该值在缓冲数组中的索引Ii。当得到下一步态周期Ti+1的极大值时,计算二者索引值的差,得到步态周期Ti内的采样点个数Ni。当Ni与N的差值大于某一阈值时,则基于式(4)动态更改采样频率f,保证步态周期Ti+1内的采样点个数Ni+1=N,确保步态信息检测的准确性。
 (4)
(4)
为了检验自适应步态检测算法的性能,测试者在跑步机上以不同的速度运动,分析检测得到的髋关节角度信息。当测试者在水平放置的跑步机上以0.5 m/s的速度行走和2 m/s的速度慢跑时,实验结果如图8所示。
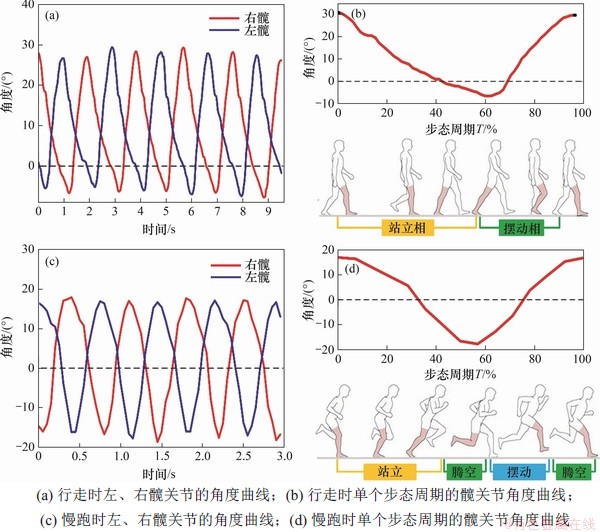
图8 自适应步态检测算法的验证结果
Fig. 8 Results of adaptive gait detection algorithm
从图8(a)和图8(c)可见:在行走和慢跑过程中,左、右髋关节的角度曲线具有周期性和一致性,二者的角度曲线除了相位相差半个周期外,曲线的峰值和周期基本保持一致。在行走过程中,单个步态周期T包含站立相和摆动相,站立相约占60%,摆动相约占40%,且髋关节角度的变化趋势稳定,如图8(b)所示。在跑步过程中,单个步态周期T包含站立、腾空、摆动和腾空4个相位,站立相约占40%,第一个腾空相约占15%,摆动相约占30%,第二个腾空相约占15%,且髋关节角度的变化趋势稳定,如图8(d)所示。基于上述实验结果,自适应步态检测算法检测得到的髋关节角度变化趋势稳定,曲线平滑性较好,满足助力系统的步态检测要求。
3 步态预测算法
步态预测算法是下肢柔性助力外衣控制系统的关键组成部分,通过分析人体当前的运动状态,实时预测人体的动作意图,使得牵引单元的末端执行元件前馈于人体动作,达到助力的效果。在充分参考国内外现有预测算法的基础上,采用牛顿预测和指数平滑预测相结合的预测算法,建立步态预测模型,基于当前采样时刻的髋关节角度,在线实时预测下一时刻的髋关节角度。
3.1 牛顿预测法
牛顿预测法是由OVASKA等设计的一种基于多项式原理的预测方法[25-26],广泛用于应用科学和理论科学领域。当预测对象μk随时间的变化满足式(5)时,则可利用牛顿预测法(6)对其进行n步超前预测。采用牛顿预测法进行预测时,只需简单的加减乘除运算,计算简单,其次,虽然要求预测对象μk对于时间k满足M阶多项式,但是无需计算多项式的系数,自适应性较强。
 (5)
(5)
 (6)
(6)
式中:λ0~λM为多项式系数;k为离散的时间点;M为多项式阶数;n为预测步长;z为离散传递函数的频域标识符; 为预测结果。
为预测结果。
为了验证牛顿预测法是否适用于预测髋关节角度,先假设髋关节角度θk随时间的变化满足式(5),则根据牛顿预测法(6)需确定多项式阶数M和预测步长n。多项式阶数M的物理含义如下[27]:当运动体瞬间不受力或所受合力为零时,多项式阶数M=1;当运动体瞬间受到恒力作用时,多项式阶数M=2;当运动体瞬间受到的力的变化趋势不变时,多项式阶数M=3。人体在运动过程中,人体下肢所受的重力保持不变,且在任意瞬间,人体下肢内部肌肉产生的拉/压力也不会发生突变,因此,人体下肢在任意瞬间都可认为是受到恒力作用,故取多项式阶数M=2。其次,预测步长n越大,预测结果的准确性也越低,由于步态预测算法需实时预测髋关节的角度信息变化,为牵引单元提供控制参数,准确性要求较高,因此,预测步长n不宜选取过大,故选n=1。综上,将M=2和n=1代入式(6),得到二阶一步牛顿预测模型为
 (7)
(7)
式(7)表明,在预测下一时刻状态时,二阶一步牛顿预测模型只需包括当前时刻状态值在内的3个状态,在实际应用时,将式(7)的频域表达形式转化为时域表达形式,得到牛顿预测算法模型为
 (8)
(8)
式中: 为牛顿预测法在k时刻的预测值;θ为髋关节角度。
为牛顿预测法在k时刻的预测值;θ为髋关节角度。
为了验证牛顿预测算法模型的实际效果,借助MATLAB软件对检测到的髋关节角度进行牛顿预测法仿真预测,预测结果如图9所示。图9(a)所示为实际预测过程中的角度曲线,预测曲线与实际曲线相比,具有明显的前馈,前馈时间为30 ms,稳定性较好,但预测曲线的波动较大,平滑性较差。图9(b)所示为实际曲线与预测曲线的对比,二者的整体拟合程度较好,误差整体限定在±2°,根据式(9),得到牛顿预测值的均方根误差(eRMSE)为1.157。综上,牛顿预测法可用于预测髋关节角度,且预测效果较好。
 (9)
(9)
式中: ,为k时刻的预测误差;
,为k时刻的预测误差; 为k+1时刻的预测值;
为k+1时刻的预测值; 为k+1时刻的实际值;Ns为采样点的个数。
为k+1时刻的实际值;Ns为采样点的个数。
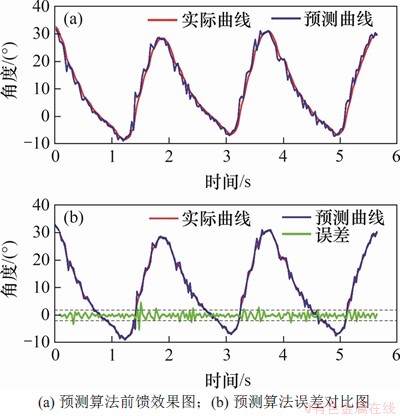
图9 牛顿预测法预测结果
Fig. 9 Results of newton prediction method
3.2 指数平滑预测法
指数平滑预测法由布朗提出[28-29],时间序列的态势具有稳定性或规则性,可合理地顺势推延,故预测值可根据以前的观测值进行加权求和,且近期的观测值权数较大,较远的观测值权数较小。根据平滑次数的不同,指数平滑预测法可分为一次指数、二次指数和三次指数平滑预测法,如表3所示。
表3 指数平滑预测法
Table 3 Exponential smoothing prediction methods

由上述内容可知,下肢髋关节角度的曲线模型具有周期性和一致性,因此,拟采用三次指数平滑预测法进行预测,数学模型为:
 (10)
(10)
 (11)
(11)
 (12)
(12)
 (13)
(13)
式中: ,
, 和
和 分别为k时刻的一次指数、二次指数和三次指数平滑值;α为平滑常数,取值范围为(0,1);
分别为k时刻的一次指数、二次指数和三次指数平滑值;α为平滑常数,取值范围为(0,1); 为三次指数平滑预测法在k时刻的预测值;参数ak,bk及ck分别为:
为三次指数平滑预测法在k时刻的预测值;参数ak,bk及ck分别为:




为了提高三次指数平滑预测法的预测精度,与牛顿预测法类似,三次指数平滑预测法选取预测步长n=1。为优选平滑常数α,利用MATLAB软件对髋关节角度数据进行仿真预测,并利用式(9)求解不同平滑常数α下的eRMSE(),如图10所示。从图10可见:当平滑常数α=0.5时,三次指数平滑预测结果的均方根误差值最小,最小值为0.962。
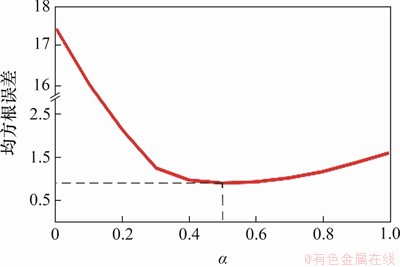
图10 不同平滑常数α下的均方根误差eRMSE
Fig. 10 eRMSE at different smoothing constant α
基于上述预测算法模型,选取平滑常数α=0.5,借助MATLAB软件对检测到的髋关节角度数据进行3次指数平滑仿真预测,如图11所示。
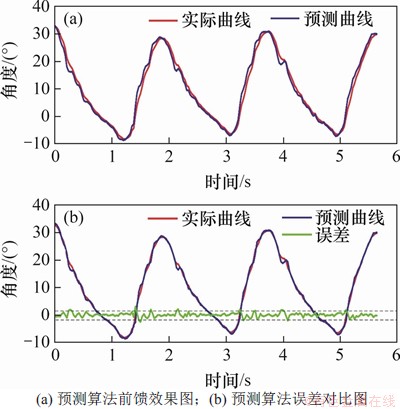
图11 三次指数平滑预测结果
Fig. 11 Results of triple exponential smoothing prediction method
图11(a)所示为实际预测过程中的角度曲线,预测图线与实际曲线相比,有较为明显的前馈,前馈时间为30 ms,稳定性较好,而且与牛顿预测法相比,平滑预测法的预测图线波动较小,平滑性较好。图11(b)所示的预测曲线与实际曲线放在同一时间轴上,以分析两者的误差变化,两曲线吻合程度较高,eRMSE()为0.962,误差在±1.5°内波动。综上,三次指数平滑预测法可用于预测髋关节的角度数据,且预测效果比牛顿预测法的优。
3.3 “牛顿+三次指数平滑”预测法
通过MATLAB软件的仿真分析,牛顿预测法的预测曲线波动较大,平滑性较差,但是由于其预测模型是多项式形式,系数固定,因此,其计算较为简单,对变量的变化具有很强的适应性。三次指数平滑预测法的预测曲线波动较小,平滑性较好,预测误差基本限制在±1.5°,相比于牛顿预测法的预测误差±2°而言较准确,为了进一步提高预测算法的精确度和平滑性,拟采用“牛顿+三次指数平滑”预测法对下肢的步态信息进行预测,引入加权系数p,对2种方法的预测结果进行加权求和,得出最后的预测结果,加权公式为
 (14)
(14)
式中: 为“牛顿+三次指数平滑”预测法在k时刻的预测值;p为加权系数,取值范围为(0,1)。
为“牛顿+三次指数平滑”预测法在k时刻的预测值;p为加权系数,取值范围为(0,1)。
为验证“牛顿+三次指数平滑”预测法的预测性能,需优选加权系数p,利用MATLAB软件对检测的髋关节角度数据进行仿真预测,并利用式(9)求解不同加权系数p下的eRMSE(),如图12所示。从图12可见:当加权系数p=0.7时,“牛顿+三次指数平滑”预测结果的均方根误差最小,最小值为0.751 6,由3.1和3.2节可知,当单独采用牛顿预测法时,均方根误差约为1.157,当单独采用三次指数平滑预测法时,均方根误差约为0.962。因此,“牛顿+三次指数平滑”预测法的准确率较高。
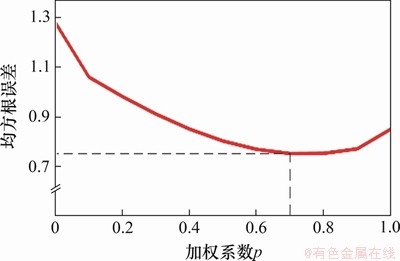
图12 不同加权系数p下的均方根误差eRMSE
Fig. 12 eRMSE at different weighting coefficient p
基于上述预测算法模型,借助MATLAB软件对检测到的髋关节角度进行仿真预测,预测结果如图13所示。
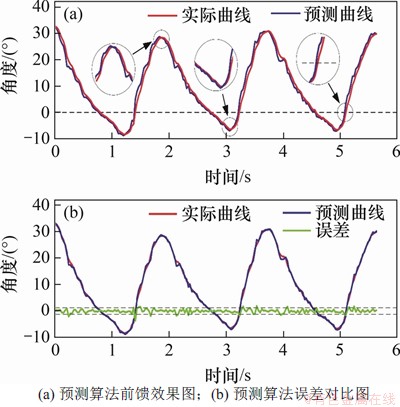
图13 “牛顿+三次指数平滑”预测结果
Fig. 13 Results of "Newton + Triple Exponential Smoothing" prediction method
从图13可见:“牛顿+三次指数平滑”预测法的预测曲线波动较小,平滑性较高,可对步态曲线的零点、极值点等特征点都可进行准确预测,此外,预测曲线与实际曲线的拟合程度提高,eRMSE()为0.751 6,误差基本限定在±1°,准确性较强。因此,“牛顿+三次指数平滑”预测法具有更好的预测性能,可作为穿戴式下肢柔性助力外衣系统的步态预测算法模型。
4 助力系统的样机评估实验
下肢柔性助力外衣系统样机的性能评估主要包括功能外衣的自身性能以及步态预测算法的预测性能,高效准确的步态预测算法是未来研究助力过程的重要前提。基于评估要求,设计了人体穿戴功能外衣的步态预测实验,通过计算控制单元间的通信时间以及牵引单元的应答时间,并适当加入由于牵引单元的惯性滞后等造成的延迟时间,预测前馈时间拟定为50 ms。实验者穿戴功能外衣,在跑步机上以不同的速度行走或跑步,测试功能外衣对人体动作的影响,验证在线预测算法的预测性能,并通过计算预测值与实际值的均方根误差,检验预测算法的准确率,预测结果如图14所示。
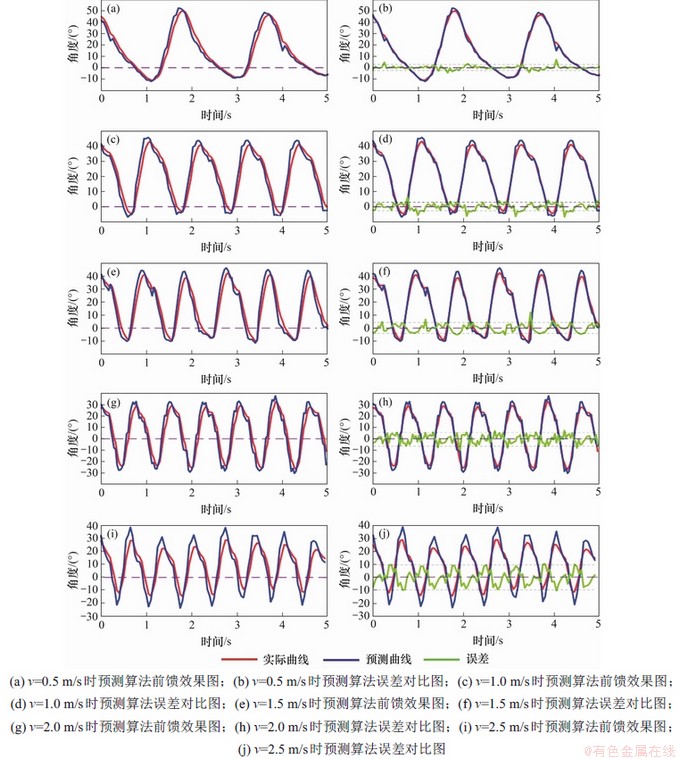
图14 不同速度下的预测算法结果
Fig. 14 Results of prediction algorithm at different speeds
由图14可知:预测曲线较实际曲线有较为稳定的前馈,预测曲线的平滑性较好,在测试者行走过程中(v=0.5,1.0和1.5 m/s),预测算法能较好地预测下肢运动曲线,前馈时间基本保持稳定,平滑性较好,稳定性较强。在测试者跑步状态下(v=2.0 m/s和2.5 m/s),预测曲线精确度有所下降,平滑性较差,误差的波动范围逐渐增大,对应的均方根误差也逐渐增加,如图15所示。
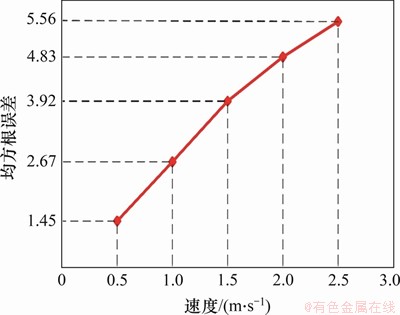
图15 不同速度下的均方根误差eRMSE
Fig. 15 eRMSE at different speeds
基于上述实验结果,“牛顿+三次指数平滑”在线预测算法可根据当前的髋关节角度,对50 ms之后的髋关节角度进行实时预测,稳定性较好,但随着运动速度的增加,预测算法的准确性和平滑性会有所降低。由于本助力系统仅针对人体行走过程进行助力,运动速度小于2.0 m/s,因此,“牛顿+三次指数平滑”在线预测算法可满足助力外衣的步态预测要求。此外,在人体运动过程中,功能外衣对人体正常动作的影响较小,不会给穿戴者带来额外负担,具有良好的穿戴舒适性,符合功能外衣的设计要求。
5 结论
1) 基于人体生理结构和助力要求,研制了一套功能外衣,整合了IMU等传感器及鲍登线固定锚点,具有较高的刚度和良好的穿戴舒适性,符合功能外衣的设计要求,可作为辅助力传递的末端执行元件包覆在人体下肢,为髋关节的前屈运动提供助力。
2) 基于助力系统的设计要求,研发了基于力位混合控制的外接驱动系统,初步完成了牵引单元与控制单元的有效整合,实现了下肢柔性助力外衣系统样机的初步搭建。
3) 设计了自适应步态检测算法,实现对下肢髋关节角度的实时高效检测,在此基础上,设计了“牛顿+三次指数平滑”下肢步态预测算法,可根据当前的髋关节角度,实时预测50 ms之后的髋关节角度,在人体行走过程中,预测过程稳定,预测曲线平滑性较好,精度较高,满足助力系统的步态预测要求,可为下肢助力研究提供依据。
参考文献:
[1] OHTA Y, YANO H, SUZUKI R, et al. A two-degree-of-freedom motor-powered gait orthosis for spinal cord injury patients[J]. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, 2007, 221(6): 629-639.
[2] SHORTER K A, KOGLER G F, LOTH E, et al. A portable powered ankle-foot orthosis for rehabilitation[J]. Journal of Rehabilitation Research and Development, 2011, 48(4): 459-472.
[3] DOLLAR A M, HERR H. Lower extremity exoskeletons and active orthoses: challenges and state-of-the-art[J]. IEEE Transactions on Robotics, 2008, 24(1): 144-158.
[4] HERR H. Exoskeletons and orthoses: classification, design challenges and future directions[J]. Journal of Neuroengineering and Rehabilitation, 2009, 6(1): 21.
[5] AMUNDSON K, RAADE J, HARDING N, et al. Hybrid hydraulic-electric power unit for field and service robots[C]// 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems. Edmonton, Alta, Canada. IEEE, 2005: 3453-3458.
[6] WALSH C J, ENDO K, HERR H. A quasi-passive leg exoskeleton for load-carrying augmentation[J]. International Journal of Humanoid Robotics, 2007, 4(3): 487-506.
[7] SCHIELE A, VAN DER HELM F C T . Influence of attachment pressure and kinematic configuration on pHRI with wearable robots[J]. Applied Bionics and Biomechanics, 2009, 6(2): 157-173.
[8] KIM J, LEE G, HEIMGARTNER R, et al. Reducing the metabolic rate of walking and running with a versatile, portable Exosuit[J]. Science, 2019, 365(6454): 668-672.
[9] PARK Y L, CHEN B R, YOUNG D, et al. Bio-inspired active soft orthotic device for ankle foot pathologies[C]// 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco, CA, USA. IEEE, 2011: 4488-4495.
[10] JOHN S W, MURAKAMI K, KOMATSU M, et al. Cross-wire assist suit concept, for mobile and lightweight multiple degree of freedom hip assistance[C]// IEEE International Conference on Rehabilitation Robotics, London, UK, 2017: 387-393.
[11] SCHMIDT K, DUARTE J E, GRIMMER M, et al. The myosuit: bi-articular anti-gravity Exosuit that reduces hip extensor activity in sitting transfers[J]. Frontiers in Neurorobotics, 2017, 11(57): 1-16.
[12] DING Ye, GALIANA I, ASBECK A T, et al. Biomechanical and physiological evaluation of multi-joint assistance with soft Exosuits[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2017, 25(2): 119-130.
[13] PARK J, PARK H, KIM J. Performance estimation of the lower limb exoskeleton for plantarflexion using surface electromyography(sEMG) signals[J]. Journal of Biomechanical Science and Engineering, 2017, 12(2): 16-00595-16-00595.
[14] DING Ye, KIM M, KUINDERSMA S, et al. Human-in-the-loop optimization of hip assistance with a soft Exosuit during walking[J]. Science Robotics, 2018, 3(15): 5438.
[15] HASHIMOTO Y, NAKANISHI Y, SAGA N, et al. Development of gait assistive device using pneumatic artificial muscle[C]// Proceedings of the Joint 8th International Conference on Soft Computing and Intelligent Systems. Sapporo, Japan, 2016: 710-713.
[16] YUAN Kebin, WANG Qining, WANG Long. Fuzzy-logic-based terrain identification with multisensor fusion for transtibial amputees[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(2): 618-630.
[17] TRILOKA J, SENANAYAKE S M N A, LAI D. Neural computing for walking gait pattern identification based on multi-sensor data fusion of lower limb muscles[J]. Neural Computing and Applications, 2017, 28(1): 65-77.
[18] JOO S B, OH S E, SIM T, et al. Prediction of gait speed from plantar pressure using artificial neural networks[J]. Expert Systems with Applications, 2014, 41(16): 7398-7405.
[19] MARTINEZ-HERNANDEZ U, DEHGHANI-SANIJ A A. Adaptive Bayesian inference system for recognition of walking activities and prediction of gait events using wearable sensors[J]. Neural Networks, 2018, 102: 107-119.
[20] MOISSENET F, LEBOEUF F, ARMAND S. Lower limb sagittal gait kinematics can be predicted based on walking speed, gender, age and BMI[J]. Scientific Reports, 2019, 9(1): 9510.
[21] 杨廷力, 刘安心, 罗玉峰, 等. 机器人机构结构综合方法的基本思想、特点及其发展趋势[J]. 机械工程学报, 2010, 46(9): 1-11.
YANG Tingli, LIU Anxin, LUO Yufeng, et al. Basic principles, main characteristics and development tendency of methods for robot mechanism structure synthesis[J]. Journal of Mechanical Engineering, 2010, 46(9): 1-11.
[22] CEREATTI A, BONCI T, AKBARSHAHI M, et al. Standardization proposal of soft tissue artefact description for data sharing in human motion measurements[J]. Journal of Biomechanics, 2017, 62: 5-13.
[23] WINTER D, WINTER D A. Biomechanics and motor control of human gait: normal, elderly and pathological[M]. Waterloo: University of Waterloo Press, 1991: 68-74.
[24] DING Ye, GALIANA I, SIVIY C, et al. IMU-based iterative control for hip extension assistance with a soft Exosuit[C]// 2016 IEEE International Conference on Robotics and Automation (ICRA). Stockholm, Sweden: IEEE, 2016: 3501-3508.
[25] 何玉庆, 韩建达. 一种新的角加速度估计方法及其应用[J]. 控制理论与应用, 2007, 24(1): 6-12.
HE Yuqing, HAN Jianda. A new angular acceleration estimation method and its application in acceleration feedback control[J]. Control Theory & Applications, 2007, 24(1): 6-12.
[26] 何玉庆, 韩建达. 基于卡尔曼滤波及牛顿预测的角加速度估计方法试验研究[J]. 机械工程学报, 2006, 42(2): 226-232.
HE Yuqing, HAN Jianda. Experimental study of angular acceleration estimation based on Kalman filter and Newton predictor[J]. Chinese Journal of Mechanical Engineering, 2006, 42(2): 226-232.
[27] 吴昌伟. 下肢外骨骼动态稳定性分析与步态跟踪控制研 究[D]. 长沙: 中南大学机电工程学院, 2014: 64-70.
WU Changwei. Dynamic stability analysis and gait tracking control for the lower extremity exoskeleton[D]. Changsha: Central South University. School of Mechanical and Electrical Engineering, 2014: 64-70.
[28] PAN Chaofeng, CHEN Yao, WANG Limei, et al. Lithium-ion battery remaining useful life prediction based on exponential smoothing and particle filter[J]. International Journal of Electrochemical Science, 2019, 14(10): 9537-9551.
[29] ANDRYSIAK T, SAGANOWSKI L, KIEDROWSKI P. Predictive abuse detection for a PLC smart lighting network based on automatically created models of exponential smoothing[J]. Security and Communication Networks, 2017, 2017: 1-19.
(编辑 杨幼平)
收稿日期: 2020 -05 -15; 修回日期: 2020 -07 -08
基金项目(Foundation item):北京市自然科学基金资助项目(3202003, 3171001, 17L20019);北京市教委科技计划项目(KM201810005015);中国博士后科学基金资助项目(2018T110017) (Projects(3202003, 3171001, 17L20019) supported by the Natural Science Foundation of Beijing Municipality; Project(KM201810005015) supported by the Science and Technology of Education Commission of Beijing Municipality; Project(2018T110017) supported by the Postdoctoral Science Foundation of China)
通信作者:李剑锋,博士,教授,从事机器人机构学与外骨骼穿戴技术研究;E-mail: lijianfeng@bjut.edu.cn
引用格式: 张雷雨, 贺彦东, 李剑锋, 等. 下肢柔性助力外衣的工效学设计与步态预测[J]. 中南大学学报(自然科学版), 2021, 52(4): 1171-1184.
Citation: ZHANG Leiyu, HE Yandong, LI Jianfeng, et al. Ergonomic design of flexible lower limb assist Exosuit and gait prediction[J]. Journal of Central South University(Science and Technology), 2021, 52(4): 1171-1184.

