��ҵ������ʵʱ�߾���·��������켣�滮
̷����, �� ��, Ф���
(���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ,���� ��ɳ, 410083)
ժҪ: �ֲ�·�����ٺؽڹ켣�滮�ǻ�����Ӧ��������һ���dz���Ҫ�Ŀ��⡣���������о���,������ͨ�����趨��·�������ӽڵ�����·���ֶ�������������ֲ������趨·���ľ���,�����ַ����ᵼ������������������ӡ������һȱ��,�����һ���µ�ʵʱ�߾���·��������ؽڹ켣�滮�������÷���ͨ�����趨���ֲ�·���ϰ�һ���������ѡȡ������ӽڵ�,ʹÿһ�켣���ϵĽڵ�����2�����ӵ�4��,������1��3�ζ���ʽ��1�����Һ�����1�����Һ����Լ�1�������Һ�����1�ζ���ʽ�ij˻����ɵĺ���������ÿһ�εĹؽڹ켣���̡����������������,��·���ֶ������䡢�ؽڹ켣�������������Լ����������������ӵ�ǰ����,���ø÷����ܴ������������ֲ������趨·���ľ��ȡ�
�ؼ���:��ҵ������;ʵʱ;�߾���;·������;�ؽڹ켣�滮;���ӽڵ�
��ͼ�����:TP24 ���ױ�ʶ��:A ���±��: 1672-7207(2005)01-0102-06
Real-time and Accurate Hand Path Tracking and Joint
Trajectory Planning for Industrial Robots
TAN Guan-zheng, XU Xiong, XIAO Hong-feng
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: The hand path tracking and joint trajectory planning is a very important research topic in the field of robot applications. Previously, researchers raised the accuracy that a robot��s hand tracks a specified path in Cartesian space mainly through increasing the number of knots on the path and the number of the path��s segments. However, this method results in the heavier online computational burden for the robot controller. Aiming at this drawback, a new kind of real-time and accurate hand path tracking and joint trajectory planning method for industrial robots was proposed. Through selecting some extra knots on the specified hand path by a certain rule, which enables the number of knots in each segment to increase from 2 to 4, and utilizing a cubic polynomial, a sinusoidal function, a cosinoidal function and a sinusoidal function with the amplitude of first-order polynomial to construct the joint displacement equation of each segment, this method can greatly raise the path tracking accuracy of robot��s hand but does not change the number of the path��s segments and the sum of joint displacement equations. It also does not markedly increase the computational burden of robot controller.
Key words: industrial robots; real-time; accuracy; hand path tracking; joint trajectory planning; extra knot
�ֲ�·��������ؽڹ켣�滮�ǹ�ҵ������Ӧ��������һ���dz���Ҫ�Ŀ���,���ڻ�������Ϳ��װ�䡢�и��������Լ��滭����ҵ�����Ź㷺��Ӧ��[1- 14]��ͨ��,Ϊ�˼��ٹ�ҵ�����˿���ϵͳ�������㸺��,�˶��������ڹؽ�����ռ��н��еġ�Ϊ��,���ȱ����ڵѿ����ռ����趨��·����ѡȡ�㹻��ĵ�(��Ϊ�ڵ�),�ٽ�����һһת���ɶ�Ӧ�Ĺؽ����ꡣȻ��,�ڹؽڿռ��н���Щ������ij�ַ�ʽ�������,�γɹ⻬�Ĺؽڹ켣����ʵ�ʿ��ƹ�����,ֻ���ø��ؽ������Ӧ�Ĺ켣�˶�,���йؽ��˶����ۺ�Ч���ͱ���Ϊ�������ֲ����Ƶ��صѿ����ռ����趨��·���˶�����Ȼ,��ȡ�Ľڵ���Խ��,·�����ٵľ���Ҳ��Խ�ߡ�����ᵼ�¹ؽڹ켣�ֶ����ؽڹ켣���������������,������ʱ����ϵͳ����������������ӡ�������[10]�ķ���ʵ�����Կ���,�ֲ�·�����پ������ס�β����·���еĸ��ڵ�֮���������͡��ڴ�, ���������һȱ��,�������ס�β2��·���ϵĹؽڹ켣���̽��иĽ�������2��·����,������1�����Һ�����1�����Һ�����,������1���µĺ���,�ú�����1�����Һ�����1��1�ζ���ʽ�ij˻�����,������2����ԭ����4�ζ���ʽ������Ϊ3�ζ���ʽ������,���ס�β2��·����,�ؽڹ켣���̽���1��3�ζ���ʽ��1�����Һ�����1�����Һ����Լ�������ĺ��������ɡ�
1 ��2�����ӽڵ��·��������ؽڹ켣�滮ԭ��
��O0-X0Y0Z0Ϊ�����˵Ļ�������ϵ����ͼ1��ʾ,�ٶ��ػ������ֲ��趨��·�������P0���յ�Pn��ѡȡ(n+1)���ڵ�,��P0,P1, ��, Pi-1,Pi, �� , Pn,���ǽ�·���ֳ�n�Ρ���Ӧ��,�ڹؽڿռ���,��ijһ�ؽ�j (j=1~N, NΪ�����˵����ɶ�),�����qj0���յ�qjn, ��켣Ҳ���ֳ�n��,���ι켣����n����������ʾ��
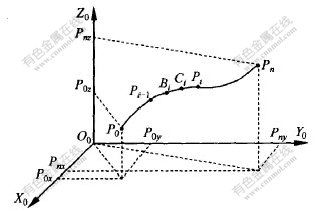
ͼ 1 ��2�����ӽڵ��ʵʱ�߾���·���滮ԭ��
Fig. 1 Principle of hand path tracking with
two extra knots on each segment
����,����ԭ�����ڵ�2���ڵ�Pi-1��Pi֮��,���趨���ֲ�·���϶���ѡȡ2�����ӽڵ�Bi��Ci,��ͼ1��ʾ�����Ƿֱ�λ��ʱ���t=ti-1+hi/3��t=ti-1+2hi/3��������,ti-1Ϊ�ڵ�Pi-1��Ӧ��ʱ��,hiΪ�ڵ�Pi-1��Pi֮���ʱ����������,�����P0���յ�Pn,�ڵ���������ԭ����(n+1)�����ӵ�(3n+1)�������ڽڵ����������˽�2��,����·�����پ���Ҳ����߽�2����������ܹؽڹ켣���췽��������ÿ��ֻ�漰1���ؽ�,Ϊ������,��ʡȥ�ؽ����j��
ͼ2��ʾΪ������ijһ�ؽ���ʱ��t�仯��λ�����ߡ�ͼ��,q0,qi-1,qi��qn�ֱ�Ϊ�ڵ�P0,Pi-1,Pi��Pn��Ӧ�Ĺؽ�����;��iΪ���ӽڵ�Bi��Ӧ�Ĺؽ�����,��iΪ���ӽڵ�Ci��Ӧ�Ĺؽ����ꡣ�ؽ�������ɽڵ��λ�ú���̬���꾭���˶�ѧ������á�
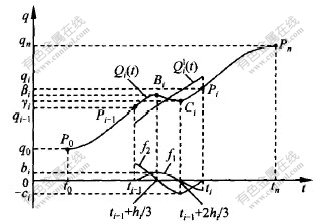
ͼ 2 ������ijһ�ؽڹ켣����ͼ
Fig. 2 Joint trajectory construction method
for some joint
��t0��tn�ֱ������P0���յ�Pn��Ӧ��ʱ��,����,����[t0 , tn]Ҳ���ָ��n�Ρ���ijһ������[ti-1, ti]����4���ڵ�,����ֹ�ڵ�Pi-1��Pi,���ӽڵ�Bi��Ci ������,Bi��Ci��Ӧ��ʱ��ֱ�Ϊ:

����:hi=ti-ti-1��
1.1 �ڵ�2�ε���n-1�ι켣��
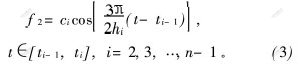
����Щ�ι켣��,���븽�ӽڵ�Bi��Ci��,ͬʱ��������2�����Ǻ���:
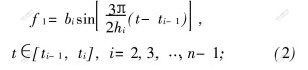
Ϊ�˹���ؽڹ켣,������1�����ζ���ʽ,�����ʽΪ:

��[ti-1, ti] (i =2,3,��,n-1) ��,�ؽڹ켣Qi(t)����ʽ(4)��f1,f2���Ӷ���,��:
��[ti-1, ti](i=2,3,��,n-1)��,�ؽ��˶��ٶ�Q[DD(-*4]��[DD)]i(t)�ͼ��ٶ�Q[DD(-*4]����[DD)]i(t)�ֱ�Ϊ:
����f1��f2֮��������ѡȡ,��Ҫ��Ϊ�˱�֤����ڵ�Bi�Ĺؽ����� ��iʱֻ��bi�й�,����ci��;����ڵ�Ci�Ĺؽ������iʱֻ��ci�й�,����bi��,�Լ��㡣 ��i�ͦ�i�ļ��㹫ʽΪ:

bi��ci�������й�ϵ:
���,���۽ڵ�Bi��Ci��λ������Q1i(t)���Ϸ������·�,ֻҪ�ʵ�ѡȡbi��ci�ķ���,����ʹQi(t)ͨ��Bi��Ci2�����ӽڵ㡣
1.2 �ڵ�1�κ͵�n�ι켣��
����2�ι켣��,�켣���̵Ĺ�����ʽ(5)��ͬ��
2 �ؽڹ켣�����Ƶ�
����㴦,�ؽ�����Ϊq0,�ٶ�Ϊv0,���ٶ�Ϊa0;�յ㴦,�ؽ�����Ϊqn,�ٶ�Ϊvn,���ٶ�Ϊan���������ν�����ʱ�������ϵĹؽڹ켣���̡�
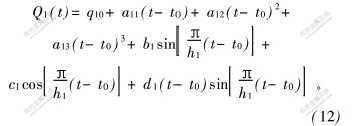
a. ������[t0 , t1]��,���븽�ӽڵ�B1��C1��,ͬʱ��������3������:
�ڸ�������,�ؽڹ켣Q1(t)����ʽ(4)��f1,f2��f3���Ӷ���,��:
���ٶȡ����ٶȷ��̷ֱ�Ϊ:

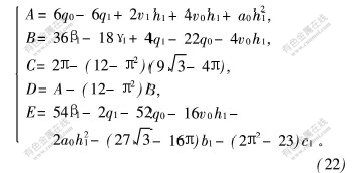
�������t0���ij�ʼ����Q1(t0)=q0, Q[DD(-*4]��[DD)]1(t0)=v0,Q[DD(-*4]����[DD)]1(t0)=a0,�Լ�t=t0+h0/3,t=t0+2h0/3��t=t1����λ������Q1(t0+h0/3)=��1,Q1(t0+2h0/3)=��1��Q1(t1)=q1,���ٶ�t=t1���Ĺؽ��ٶ�v1=(q1-q0)/h1,�ɵ�7�����̡��������ɵõ�1�ι켣����(12)~(14)�ĸ���ϵ��Ϊ:
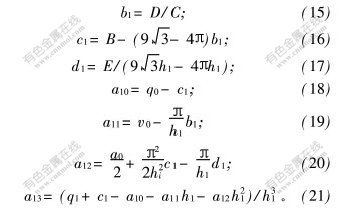
����:
b. ������[ti-1 , ti] (i=2,3,��,n-1)��,�ؽ�λ�ơ��ٶȺͼ��ٶȷ��̼�ʽ(5)~(7),��������2�ι켣���̵�ϵ�����Խ������ƹ�ϵ����t=ti-1,t=ti-1+hi/3,t=ti-1+2hi/3�Լ�t=ti����λ����������qi-1,��i,��i��qi����Qi(t),ע�ti-1�����ٶ���������Q[DD(-*4]��[DD)]i-1(ti-1)=Q[DD(-*4]��[DD)]i(ti-1),����ti���Ĺؽ��ٶ�Ϊ:vi=(qi-qi-1)/hi���������ɵ�����ϵ�����ƹ�ϵ
:

����
c. ������[tn-1, tn]��,�켣���̵��Ƶ���ʽ(1)���Ƶ�����,��ؽ�λ�ơ��ٶȺͼ��ٶȵķ��̷ֱ�Ϊ:

���ʼ�����������������ֱ�Ϊ:Qn(tn-1)=qn-1,Q[DD(-*4]��[DD)]n(tn-1)=vn-1,Qn(tn)=qn,Q[DD(-*4]��[DD)]n(tn)=vn,Q[DD(-*4]����[DD)]n(tn)=an,Qn(tn-1+hn/3)=��n,Qn(tn-1+2hn/3)=��n������Щ�������뷽��ʽ(30)~(32),���������̿���õ�n�ι켣����(30)~(32)�ĸ�ϵ��Ϊ:

����:
��ָ������,������3�ζ���ʽ�����Ǻ���������Ĺؽڹ켣,�ڸ��ӽڵ�Bi��Ci(i=1,2,��,n)���ؽڼ��ٶ���������,���ڽڵ�Pi(i=1,2,��,n-1) ��,�ؽڼ��ٶȲ���������Ҫ��֤��Pi(i=1,2,��,n-1)���ؽڵļ��ٶ�����,��������4�ζ���ʽ�����Ǻ���������ؽڹ켣��
3 �����Լ�����
3.1 ������
����ָ�ؽ����곬�����Ͻ���½�ֵ����ͼ2��,������[ti-1, ti](i=2,3,��,n-1)��Q1i(t)��һ��3�ζ���ʽ����,������1�����ܵĹյ��û�йյ㡣����,�������������Ǻ���f1��f2,���Բ�������Q1i(t)������[ti-1, ti]�����յ�,�µĹؽڹ켣Qi(t)�ڸ������ϵ����ֵ����Сֵ����һ��������qi-1,��i,��i�Լ�qi����֮�С�����,��������涨���Һ���f1�����Һ���f2�ֱ������Ӧ�ĸ��ӽڵ�Bi��Ci��ȡ�÷�ֵ,�ڸ������ڵ������㴦,���ǵ�ֵ��С�����ֵ��������������,����µĹؽڹ켣Qi(t)������[ti-1, ti](i=2,3,��,n-1)�ϵ����ֵ����Сֵ��������max(qi-1,��i,��i,qi)��min(qi-1, ��i, ��i,qi)�����,ֻҪ�趨�Ĺ켣���ڹؽڱ߽�ֵ����,����Щ�켣���ϾͲ��ᷢ���������⡣���Ƶ�,������[t0, t1]��[tn-1, tn]�Ͼ��ܹؽڹ켣���̶�������һ������f3,�����ں���f1,f2��f3�ķ�ֵͬ���ܵ����ϵĽڵ���ӽڵ�Ĺؽ�����ֵ������,����,ֻҪ�趨�Ĺ켣���ڹؽڱ߽�ֵ����,����2�ι켣��Ҳ���ᷢ���������⡣
3.2 ����
����Ӧָ��,������[ti-1,ti] (i=1,2,��,n)�����뺯��f1,f2��f3,��������������صĹؽڹ켣��,���������ڹؽڹ켣ͨ�����ӽڵ�,�Ӷ���߹켣���پ��ȡ�
������[ti-1, ti] (i=2,3,��,n-1)��,������������Ǻ���f1��f2�����ڵ�������[ti-1, ti]���ȵ�4/3��,f1��f2���ߵ��Ӻ�������ڸ������Ͻ�����1��������,�����ζ���ʽ����Q1i(t)������[ti-1, ti]�����յ�,�µĹؽڹ켣Qi(t)�ڸ������Ͽ��ܷ���1~2��������,��������[ti-1, ti]һ��Ƚ�С,�����ڹؽ�����ֵ�ı仯����ܴ�,�������Ǻ���f1��f2�����ڸ��ӽڵ㴦ȡ�÷�ֵ,���ʹf1��f2�ķ�ֵ�ܵ����ơ�����Щ�켣���ϼ�ʹ�ؽڹ켣����,�����Ҳ����̫��,�������е���������������ˡ�������[t0, t1]��[tn-1, tn]��,����f1,f2��f3�����ڶ��������䳤�ȵ�2��,������f1��f3�����Һ���,��f2�����Һ���,����,���ߵ��Ӻ�������ڸ������Ͻ�����1��������,��3�ζ���ʽ����Q1i(t)������[ti-1, ti]�����յ�(i=1��n),�µĹؽڹ켣Qi(t)�ڸ������Ͽ��ܲ���1~2����ͬ��,���ں���f1,f2��f3�ķ�ֵ�����ܵ��ڵ���ӽڵ�Ĺؽ�����ֵ������,����,����2���켣���ϼ�ʹ�ؽڹ켣����,�����Ҳ����̫��
4 ���������ʵ��
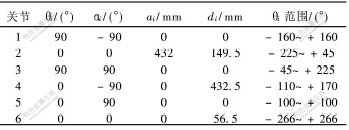
��6���ɶȵ�PUMA560������Ϊ��,��������ķ����Ժ�2�����ӽڵ��·������������м��������,��������[10]�������õķ������бȽϡ�PUMA560�����˸������֮��Ĺ�ϵ�����Լ����ؽڱ����ı仯��Χ���1��ʾ��
Ϊ���ڹ۲�·�����ٵľ���,����ʱȡ�������ֲ����趨·��Ϊֱ�ߡ��ڸû����˵Ļ�������ϵO0-X0Y0Z0��,ֱ�ߵ����P0���յ�Pn������ֱ��趨Ϊ:Pox=400 mm,Poy=600 mm,Poz=-400 mm;Pnx=-500 mm,Pny=600 mm,Pnz=-360 mm��
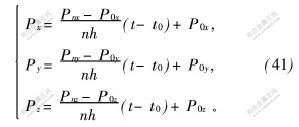
���ü������̬ͼ�η��漼��,���ڼ������Ļ����ʾPUMA560�������ֲ�ֱ��·��,��ͼ3��ʾ�����轫ʱ������[t0, tn]�ȷֳ�n��������,����ÿһ������[ti-1, ti] (i=1,2,��,n)�ij��ȶ�����h,���ֱ��·���IJ������̿ɱ�ʾΪ:
�ٶ��������ֲ��ظ�ֱ��·���˶�ʱ����̬����,����3��ŷ����Ϊ:��=-65��,��=185��,��=-105�㡣����ʱ,��ؽ��ٶ�ʸ��v��=vn=[0,0,0,0,0,0];���ٶ�ʸ��a0=an=[0,0,0,0,0,0]������t0=0 s,tn=6 s,�ֶ���n=5 ,��h=1.2 s������IJ�������ȡ0.2 s�����������ͼ4��ʾ��
ͼ4�����˻������ֲ����ٵѿ����ռ����趨��ֱ��·��ʱ,�ֱ��ڻ�������ϵ��X0,Y0��Z0�᷽��ĸ������������,���߱�ʾ��������[10]�ķ������ó��Ļ������ֲ��ĸ���·��,ʵ�����ʾ���ñ�������ķ������ó��Ļ������ֲ��ĸ���·������ͼ�пɿ���,���ס�β2��,����1�͵�5��,�����µĺ���f3��,�������ֲ�����ֱ��·���ľ����������,���ӽӽ��趨��ֱ��,�Ӷ�֤��������ķ����ɽ���Ч�ؿ˷�����[10]�д��ڵ�ȱ�ݡ�
�� 1 PUMA560�����˵����˲���
Table 1 Link parameters of PUMA560 robot
ͼ 3 �趨�Ļ������ֲ�·��
Fig. 3 Specified hand path of PUMA560 robot
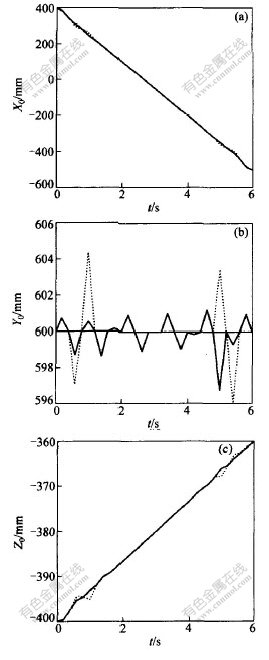
(a)��X����ٹ켣; (b)��Y����ٹ켣; (c)��Z����ٹ켣
������2�����ӽڵ㲢���뺯��f1��f2���ֲ�����·��;
-����2�����ӽڵ㲢���뺯��f1,f2��f3���ֲ�����·����
ͼ 4 �������ֲ�����ֱ��·�������
Fig. 4 Robot��s hand tracking a specified
straight line path
5 �� ��
a. �����һ���µĻ����˸߾���·�����ټ��ؽڹ켣�滮����,ͨ����ÿһ�켣��������2�����ӽڵ㲢����2~3�����Ǻ���,�����ӽ��ټ������������,�ɴ������������ֲ������趨·���ľ��ȡ�
b. �о��˹ؽڹ켣���̵Ĺ��췽��,�����������ڹ켣�ιؽڹ켣����ϵ���ĵ��ƹ�ʽ��
c. ��6���ɶȵ�PUMA560������Ϊ��,��������ķ��������˼������̬ͼ�η���,֤ʵ�˸÷�������ȷ�Ժ���Ч�ԡ�
�����:
[1]TONDU B, BAZAZ A. The Three-cubic Method: An Optimal Online Robot Joint Trajectory Generator Under Velocity, Acceleration and Wandering Constraints[J]. The International Journal of Robotics Research, 1999, 18(9): 893-901.
[2]GALICKI M. The Planning of Robotic Optimal Motions in the Presence of Obstacles[J]. The International Journal of Robotics Research, 1998, 17(3): 248-259.
[3]TAN Guan-zheng, LI Tan. Optimum Motion Planning of CS-I Industrial Robot with Two Manipulators [A]. Proceedings of IEEE 1997 International Conference on Intelligent Processing Systems [C]. Beijing, 1997.
[4]LIN C S, CHANG P R, LUH J Y S. Formulation and Optimization of Cubic Polynomial Joint Trajectories for Mechanical Manipulators[J]. IEEE Transactions on Automatic Control, 1983, 28(12): 1066-1078.
[5]CHAND S, DOTY K L. On-line Polynomial Trajectories for Robot Manipulators[J]. The International Journal of Robotics Research, 1985, 4(2): 38-48.
[6]BOBOW J E, DUBOWSKY S, GIBSON J S. Time-optimal Control of Robotic Manipulators along Specified Paths[J]. The International Journal of Robotics Research, 1985, 4(3): 3-17.
[7]AKEN L V, BRUSSEL H V. On-line Robot Trajectory Control in Joint Coordinates by Means of Imposed Acceleration Profiles [J]. Robotica, 1988, 6(2): 185-195.
[8]LUH J Y S, LIN C S. Approximate Joint Trajectories for Control of Industrial Robots Along Cartesian Path[J]. IEEE Transactions on Systems, Man and Cybernetics, 1984, 14(3): 444-450.
[9]TAN Guan-zheng, LIANG Feng, WANG Yue-chao. Real-time Accurate Hand Path Tracking and Joint Trajectory Planning for Industrial Robots (I)[J]. Journal of Central South University of Technology (English Edition), 2002, 9(3): 191-196.
[10]TAN Guan-zheng, HU Sheng-yuan. Real-time Accurate Hand Path Tracking and Joint Trajectory Planning for Industrial Robots (II)[J]. Journal of Central South University of Technology (English Edition), 2002, 9(4): 273-278.
[11]MEZOUAR Y, CHAUMETTE F. Path Planning for Robust Image-based Control[J]. IEEE Transactions on Robotics and Automation, 2002, 18(4):534-549.
[12]LANGE F, HIRZINGER G. Predictive Visual Tracking of Lines by Industrial Robots[J]. The International Journal of Robotics Research, 2003, 22(10): 889-903.
[13]KONG Fan-sen, GUO Kong-hui, SUN Guang-sheng, et al. Fuzzy Evaluation and its Simulation for Handling and Stability of Driver/vehicle/road Closed-loop System[J]. Chinese Journal of Mechanical Engineering, 2002, 38(11): 75-79.
[14]MEZOUAR Y, CHAUMETTE F. Optimal Camera Trajectory with Image-based Control[J]. The International Journal of Robotics Research, 2003, 22(10): 781-803.
�ո�����:2004-05-02
������Ŀ:������Ȼ��ѧ����������Ŀ(50275150); �й���ѧԺ������ѧ�����о�ʵ���һ���������Ŀ(RL200002)
�����:̷����(1962-),��,������̶��,����,��ʿ,�������ܻ�����ϵͳ����ơ��˹����ܼ���Ӧ�ú��Ƚ������������Ƚ��㷨�о�
������ϵ��: �� ��,��,˶ʿ�о���;�绰:0731-8716259(O); E-mail: wisdom8305@tom.com

