基于径向基函数网络调节的船舶航向非线性系统滑模控制
肖海荣1, 2,李贻斌1,周风余1,韩耀振2
(1. 山东大学 控制科学与工程学院,山东 济南,250061;
2. 山东交通学院 信息工程系,山东 济南,250357)
摘要:针对船舶航向非线性系统,提出一种基于径向基函数神经网络增益调节的滑模变结构控制器。系统由船舶运动非线性响应模型和舵机伺服系统串联构成,其中运动响应模型考虑了船舶航行中航速、装载状态变化及受风、流、浪外界干扰作用的不确定性。滑模变结构控制和径向基函数神经网络在非线性应用领域可形成优势互补,把径向基函数神经网络增益调节的变结构控制器应用于船舶航向控制。仿真结果表明:其大大降低了滑模控制的抖振,取得较好的控制效果。
关键词:船舶航向控制;径向基函数神经网络;滑模控制;切换增益调节
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2011)S1-0017-06
Sliding mode control of ship course nonlinear system based on radial basis function network adjustment
XIAO Hai-rong1, 2, LI Yi-bin1, ZHOU Feng-yu1, HAN Yao-zhen2
(1. School of Control Science and Engineering, Shandong University, Jinan 250061, China;
2. Department of Information Engineering, Shandong Jiaotong University, Jinan 250357, China)
Abstract: A sliding mode variable structure controller based on radial basis function network adjustment was proposed for ship course nonlinear system. The cascaded system consists of the nonlinear ship response model and the rudder actuator dynamics. The response model takes account of the modeling errors and external disturbances and other uncertainties. A ship course sliding mode controller was designed and radial basis function network was introduced to adjust switching gain of the controller because it has strong chattering. The switching function was regarded as the input of radial basis function network while the output is the absolute value of the switching gain. The results of simulation demonstrate the validity, satisfactory adaptation and robustness of the presented controller.
Key words: ship course control; radial basis function neural network; sliding mode control; switching gain adjustment
船舶操纵运动是一个时变、非线性和有干扰的过程。由于船舶运动的复杂性,船舶的动态特性具有大惯性、大时滞、非线性等特点,受到的环境影响是随机的和难以预测的,传统的PID、自适应控制控制方法无法有效控制未建模动态系统,从而影响了自动舵的控制效果。目前船舶运动控制技术主要有[1]:参数自适应控制技术、现代鲁棒控制策略、滑模变结构控制方法、基于人工智能的控制策略、混合控制策略等,以适应船舶航向航迹控制的要求。
滑模变结构控制作为一种非线性控制,与常规控制的根本区别在于控制的不连续性[2-3]。它利用一种特殊的滑模控制方式,强迫系统的状态变量沿着人为规定的相轨迹滑到期望点。滑模变结构控制器对于存在未知非线性、外界干扰和参数摄动的不确定系统具有较强的鲁棒性,而且滑动模态对摄动的不变性有益于控制系统设计。在理想控制条件下,即控制量的切换不存在任何时间和空间滞后,系统在滑模上的运动将不受干扰的影响,按自身的运动规律趋向原点。但是,在实际控制问题中,控制量在进行切换时不可避免地存在时间滞后,造成系统状态围绕滑模的抖动,而且控制量切换幅度越大,抖动越明显,因此,有必要研究减弱消除抖振的方法。径向基函数(Radial basis function, RBF)神经网络具有结构简单、收敛速度快、无局部极小等特点,已证明它能以任意精度逼近任一连续函数。将RBF神经网络与滑模变结构控制相结合已经成功应用于机器人[4]、飞行器姿态控制[5]、电动车再生制动[6]等领域。针对船舶航向控制,考虑到滑模控制的抖振是由其控制器切换项的增益决定的,提出了一种新的控制方案,即采用RBF神经网络对切换项的增益进行调节,以降低滑模控制的抖振,取得较好的控制效果。
1 船舶航向控制系统操纵运动数学模型
20世纪50年代末,野本谦作从控制理论的角度建立了响应型船舶操纵运动数学模型[7],描述了以舵角δ为系统输入、航向角ψ为系统输出的动态系统:
 (1)
(1)
式中:T1,T2和T3为二阶Nomoto模型的追随性操纵性指数;K为旋回性操纵性指数。在低频时,式(1)可以简化为一阶Nomoto模型。

 (2)
(2)
考虑到船舶是一种大惯性的运动物体,其动态特性只在低频段是重要的,因而,船舶自动舵的控制器一般是基于一阶或二阶Nomoto模型进行设计。显然,Nomoto模型是一种线性模型,只适用于船舶航速为常数、在平衡位置作小偏移的操纵运动,若在航向改变操纵中涉及大舵角,则船舶存在严重的非线性。
考虑不确定性,非线性形式[8]可写为:
 (3)
(3)
其中: 为航向;
为航向; 为舵角;T和K为操纵性指数,K<0时为航向不稳定;ω为外界干扰,且增益有界;
为舵角;T和K为操纵性指数,K<0时为航向不稳定;ω为外界干扰,且增益有界; 为建模误差;
为建模误差; 为非线性项系数,
为非线性项系数,
 (4)
(4)
pi(i=0, 1, 2, 3)为模型参数。通常舵机特性用如下的模型表示:
 (5)
(5)
其中: 为命令舵角;TE为舵机时间常数,一般约为2.5 s;KE为舵机控制增益,一般约为1;与
为命令舵角;TE为舵机时间常数,一般约为2.5 s;KE为舵机控制增益,一般约为1;与 分别为舵角及转舵速度,一般限制为
分别为舵角及转舵速度,一般限制为 ≤35°,
≤35°, ≤3°/s。
≤3°/s。
以 表示设定航向,取状态变量
表示设定航向,取状态变量 ,
, ,
, ,
, ,控制量
,控制量 ,则考虑外界风、浪、流干扰及建模误差等不确定性的船舶航向非线性控制系统数学模型为:
,则考虑外界风、浪、流干扰及建模误差等不确定性的船舶航向非线性控制系统数学模型为:

 (6)
(6)
2 RBF神经网络与滑模控制结合应用
基于滑模变结构控制存在的不足,将其与RBF神经网络控制相结合,以使系统在保持对摄动和外部干扰强鲁棒性的同时,尽量消除抖振的发生。许多研究者就二者的结合进行了很多研究工作,得到了许多非常有意义的成果。本文对这些方法进行简单总结,以深入探索船舶运动控制的最佳策略。
(1) RBF神经网络在线辨识不确定性的上界值。滑模控制要求系统的各个不确定性的上界值必须已知。但对于实际系统,上界值一般无法测量,采用RBF神经网络可以对干扰的上界进行自适应学习,并可降低抖振。设被控对象为:
 (7)
(7)
其中:b>0; 为角度;
为角度; 为角速度;f和b为未知量;fd为外加干扰信号;u为控制输入。将系统分成名义模型和不确定系统2部分,用RBF网络作为滑模动态补偿器对不确定系统进行控制。RBF网络的输入为
为角速度;f和b为未知量;fd为外加干扰信号;u为控制输入。将系统分成名义模型和不确定系统2部分,用RBF网络作为滑模动态补偿器对不确定系统进行控制。RBF网络的输入为 ,输出为不确定参数上界的估计值
,输出为不确定参数上界的估计值 。
。
 (8)
(8)
其中: 为RBF神经网络的权值;
为RBF神经网络的权值; 为高斯函数。该方法无需建立精确的数学模型,可实现对具有外部扰动及参数变化等不确定因素的对象进行鲁棒控制。
为高斯函数。该方法无需建立精确的数学模型,可实现对具有外部扰动及参数变化等不确定因素的对象进行鲁棒控制。
(2) 将切换函数作为RBF网络的输入,滑模控制为RBF网络的输出,实现单输入单输出系统的神经网络变结构控制。被控对象为:
 (9)
(9)
切换函数设计为:
 (10)
(10)
其中: ;
; ;r(t)为给定输入。
;r(t)为给定输入。
将滑模控制器设计为RBF神经网络的输出,即:
 (11)
(11)
其中:n为隐含层神经元个数。控制的目标是使 ,则RBF网络的权值调整指标为:
,则RBF网络的权值调整指标为:

 (12)
(12)
其中:η>0。
(3) 基于RBF的等效滑模控制。以控制系统的状态量作为RBF神经网络的输入,滑模切换控制量作为RBF网络的输出。
(4) 基于线性化反馈的神经网络变结构控制。N阶SISO非线性系统为: ,在实际控制中
,在实际控制中 和
和 往往未知,利用线性化反馈方法设计的滑模控制律很难实现,可采用RBF神经网络的输出
往往未知,利用线性化反馈方法设计的滑模控制律很难实现,可采用RBF神经网络的输出 和
和 代替和,实现自适应神经滑模控制。
代替和,实现自适应神经滑模控制。
(5) 基于RBF网络切换增益调节的滑模控制。滑模控制的抖振是由其控制器切换项的增益决定的,采用神经网络对切换项的增益进行调节,可大大降低滑模控制的抖振。
3 控制器设计
3.1 固定增益滑模控制器的设计
设计滑动模态超平面方程为[9-10]:
 (13)
(13)
其中:c为常数,c>0,则:
 (14)
(14)
令 =0,并假设不确定性和干扰为0,得:
=0,并假设不确定性和干扰为0,得:
 (15)
(15)
从而得到等效控制器:
 (16)
(16)
选取等速趋近率 (其中,ε为增益项,是大于0的常数)。则切换控制器为:
(其中,ε为增益项,是大于0的常数)。则切换控制器为:
 (17)
(17)
总控制器为:
 (18)
(18)
稳定性证明:定义系统滑模动态的Lyapunov函数为
 (19)
(19)
则
 (20)
(20)
显然 ≤0,航向角的偏差是收敛的,能够完成要求的设定航向的跟踪。可见,理想情况下系统中的不确定因素即未知干扰力矩对滑动模态运动没有影响,但在实际控制问题中,控制量在进行切换时不可避免地存在时间滞后,从而造成抖动。下面采用RBF网络对增益进行调节来有效消除抖动。
≤0,航向角的偏差是收敛的,能够完成要求的设定航向的跟踪。可见,理想情况下系统中的不确定因素即未知干扰力矩对滑动模态运动没有影响,但在实际控制问题中,控制量在进行切换时不可避免地存在时间滞后,从而造成抖动。下面采用RBF网络对增益进行调节来有效消除抖动。
3.2 基于径向基函数神经网络的增益调节
目前神经网络中应用较多的是反向传播 (Back propagation, BP)网络,但是,BP网络存在易陷入局部极小、训练速度慢、效率低等缺点,RBF神经网络在一定程度上克服了BP网络存在的不足。RBF网络是一种性能良好的前向网络,具有下述特点[11]:
(1) 不依赖精确的数学模型,具有广泛的从输入到输出的任意非线性映射能力,能以任意精度逼近任意非线性特性,是一种全局逼近网络;分布式信息存储大量数据单元同时高速并行处理,有很强的鲁棒性;
(2) 信息存储于处理单元的阈值和它们的联接权中,具有很强的容错能力,个别处理单元不正常不会引起整个系统出错;应用多种调整权值和阈值的学习算法,具有类似人脑的学习功能。
基于RBF网络的增益调节的船舶航向控制系统原理框图如图1所示。将系统的期望航向角与实际航向角进行比较,所得差值以及差值的变化率分别被送入滑模面函数中,然后,将滑模面函数及其变化率送入神经网络对增益ε进行自适应调整后将其送入滑模控制器,计算控制输出,再由执行机构予以执行。系统模型根据指令要求计算新的航向角,从而构成船舶航向控制系统回路。
通常,RBF网络是一种单隐层的三层前馈网络,由输入到输出的映射是非线性的,而隐含层空间到输出空间的映射是线性的,从而大大加快了学习速度并避免局部极小问题。RBF网络结构如图2所示。

图1 RBF网络增益调节的滑模控制器结构
Fig.1 Sliding mode controller structure based on RBF network adjustment

图2 RBF神经网络结构
Fig.2 Structure of RBF network
网络有3层:输入层、隐含层和输出层。假设每层的节点数分别为i,j和1。
采用RBF神经网络来调节切换控制的增益ε,设RBF网络的输入为 ,输出的绝对值为切换控制项的增益ε,取
,输出的绝对值为切换控制项的增益ε,取
 (21)
(21)
其中:h(x)为高斯函数,
 (22)
(22)
i=1, 2;j=1, 2;mi为第i个神经元的中心位置; 为第i个神经元的宽度。神经网络权值调整的指标为
为第i个神经元的宽度。神经网络权值调整的指标为
 (23)
(23)
其中: ;为给定航向阶跃响应信号。网络权值调整算法为[12]:
;为给定航向阶跃响应信号。网络权值调整算法为[12]:

 (24)
(24)
其中: 主要取决于正负号,其值可以通过权值来补偿。结合式(11)和(15)得权值调整算法为:
主要取决于正负号,其值可以通过权值来补偿。结合式(11)和(15)得权值调整算法为:
 (25)
(25)
网络权值学习算法为:
 (26)
(26)
式中: 为网络学习速率,
为网络学习速率, ;为惯性量系数,
;为惯性量系数, 。
。
4 仿真研究
以某船型为例进行仿真研究。该船船长L为149 m,船宽B为20.1 m,吃水深度d为6.861 m,方型系数CB为0.618,仿真时取航速v=9.5 m/s,p3=30,p2=25,p1=20,p0=0。此时,T1=72.49,T2=8.54,T3=17.61,K=0.114 1,T=63.42,KE=1,TE=2.5, ,
, ,W=0,RBF神经网络输入层及隐含层节点数都为2,初始权值w(0)=[0.6,0.6,0.6]T,高斯参数取
,W=0,RBF神经网络输入层及隐含层节点数都为2,初始权值w(0)=[0.6,0.6,0.6]T,高斯参数取 ,
, ,神经网络学习参数
,神经网络学习参数 ,
, 。
。
4.1 标称模型时的控制仿真
不考虑外界风、浪、流干扰及建模误差,即 0,建模误差
0,建模误差 。给定航向角取8°的阶跃信号时,固定增益的滑模控制与基于RBF网络增益调节的滑模控制的航向角、控制舵角及滑模控制器的输出仿真结果如图3~5所示。
。给定航向角取8°的阶跃信号时,固定增益的滑模控制与基于RBF网络增益调节的滑模控制的航向角、控制舵角及滑模控制器的输出仿真结果如图3~5所示。
从图3~5可以看出:将基于RBF网络切换增益调节的滑模控制器引入船舶航向控制系统后,系统航向角在具有较大初始偏差的情况下,也能够迅速地稳定在期望值,控制系统同时具有优良的动态性能和稳态性能,大大削弱了抖动,其性能明显优于只采用变结构控制器的性能。
4.2 外部干扰及参数摄动
关于风、流、海浪的干扰,不同的文献中获得的干扰模型方法不同[13],可以用以下函数对船舶受到的扰动ω进行模拟。
(1) 风或流对船舶的恒值干扰,ω=8°;
(2) 风、浪、流综合正态分布随机干扰:ω= 4.58H1+3.44H2。其中:H1和H2为2个相互独立的服从标准正态分布N(0, 1)的伪随机变量。
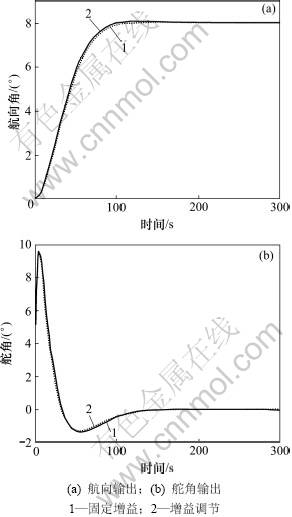
图3 固定增益及增益可调时航向角和舵角输出
Fig.3 Output of course angle and rudder angle when gain is fixed and adjustable
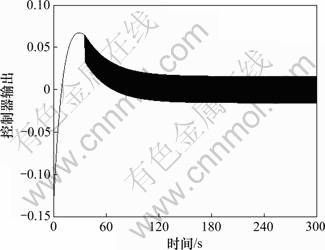
图4 固定增益时滑模控制器输出
Fig.4 Output of sliding mode controller when gain is fixed
(3) 风、浪、流综合均匀随机干扰:ω=4.58H3+ 3.44H4。其中:H3和H4是2个相互独立的服从[0, 1]均匀分布的伪随机变量。
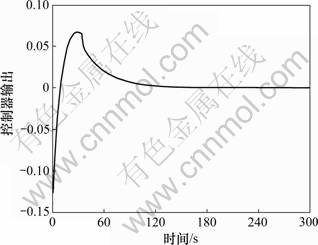
图5 RBF网络增益调节时滑模控制器输出
Fig.5 Output of sliding mode controller when gain is adjustable by RBF network
本文采用风、浪、流综合均匀随机干扰,以及由于装载、航速的变化,系统模型的参数可能会发生摄动,存在建模误差,对模型参数按照各自的15%独立地随机变化,得到仿真结果如图6和图7所示。由图7可知:在存在干扰及外部摄动时,PID缺乏应对干扰的能力,航向明显偏离了设定值,而本文所设计的控制系统具有较高的控制精度和良好的鲁棒性。
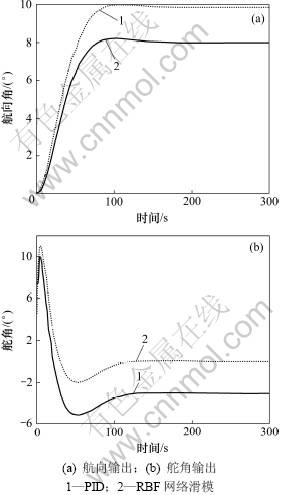
图6 2种控制器下航向及舵角输出
Fig.6 Output of course angle and rudder angle under two controllers
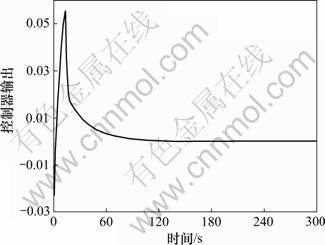
图7 有干扰及参数摄动时滑模控制器输出
Fig.7 Output of sliding mode controller when disturbance and parameter perturbation are existed
5 结论
本文研究了由船舶刚体运动和舵机伺服系统构成的船舶非线性系统航向控制问题。建立了基于RBF神经网络切换增益自适应调节的船舶航向滑模控制器,仿真结果验证了控制器的有效性,表明了其具有良好的适应性和鲁棒性。下一步可以引入新的RBF神经网络学习算法即梯度正交模型选择算法,以提高控制效率及消除抖振。
参考文献:
[1] 罗伟林, 邹早建, 李铁山. 船舶航向非线性系统鲁棒跟踪控制[J]. 控制理论与应用, 2009, 26(8): 893-895.
LUO Wei-lin, ZOU Zao-jian, LI Tie-shan. Robust tracking control of nonlinear ship steering[J]. Control Theory & Applications, 2009, 26(8): 893-895.
[2] 高为炳. 变结构控制的理论及设计方法[M]. 北京: 科学出版社, 1996: 152-174.
GAO Wei-bing. Variable structure control theory and its design method[M]. Beijing: Science Press, 1996: 152-174.
[3] Pérez M, Jiménez E, Camacho E F. Robust stability analysis and tuning of a predictive sliding mode controller[J]. European Journal of Control, 2010, 16(3): 275-288.
[4] Ayca G A, Galip C. Three link robot control with fuzzy sliding mode controller based on RBF neural network[J]. IEEE Transactions on Intelligent Control, 2006, 1(1): 2719-2724.
[5] 秦莉, 杨明, 王子才. 基于RBF网络的飞行器姿态滑模控制器[J]. 航天控制, 2007, 25(4): 41-45.
QIN Li, YANG Ming, WANG Zi-cai. Attitude sliding mode controller based on RBF network[J]. Aerospace Control, 2007, 25(4): 41-45.
[6] CAO Jian-bo, CAO Bing-gang, XU Peng, et al. Regenerative braking sliding mode control of electric vehicle based on neural network identification[C]//IEEE International Conference on Digital Object Identifier. Beijing: IEEE, 2008: 1219-1224.
[7] 杨盐生, 贾欣乐. 船舶航行的变结构控制自动舵设计[J]. 大连海事大学学报, 1998, 24(1): 13-16.
YANG Yan-sheng, JIA Xin-le. Design for ship autopilot using variablestructure control algorithm[J]. Journal of Dalian Maritime University, 1998, 24(1): 13-16.
[8] 徐益, 老大中, 李东海, 等. 船舶航向非线性控制系统仿真研究[J]. 船舶工程, 2009, 31(1): 38-44.
XU Yi, LAO Da-zhong, LI Dong-hai, et al. Simulation study on nonlinear control of ship course[J]. Ship Engineering, 2009, 31(1): 38-44.
[9] 刘金琨. 滑模变结构控制MATLAB仿真[M]. 北京: 清华大学出版社, 2006: 217-231.
LIU Jin-kun. MATLAB simulation for sliding mode variable structure control[M]. Beijing: Tsinghua University Press, 2006: 217-231.
[10] 管成, 潘双夏. 含有非线性不确定参数的电液系统滑模自适应控制[J]. 控制理论与应用, 2008, 25(2): 261-267.
GUAN Cheng, PAN Shuang-xia. Sliding mode adaptive control of electro-hydraulic system with nonlinear unknown parameters[J]. Control Theory & Applications, 2008, 25(2): 261-267.
[11] 邹阿金, 张雨浓. 径向基函数神经网络及应用[M]. 广州: 中山大学出版社, 2009: 65-101.
ZOU A-jin, ZHANG Yu-nong. Radial basis function neural network and its application[M]. Guangzhou: Sun Yat-Sen University Press, 2009: 65-101.
[12] 孙宜标, 郭庆鼎. 基于RBF神经网络补偿的直线伺服系统滑模鲁棒跟踪控制[J]. 控制理论与应用, 2004, 21(2): 252-256.
SUN Yi-biao, GUO Qing-ding. Sliding mode robust tracking control for linear servo system based on RBF neural networks compensation[J]. Control Theory & Applications, 2004, 21(2): 252-256.
[13] Moreira-Lúcia, Fossen-Thor I, Guedes S C. Path following control system for a tanker ship mode [J]. Ocean Engineering, 2007, 34(15): 2074-2085.
(编辑 陈灿华)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:山东省自然科学基金资助项目(ZR2009FL013);山东交通学院“船舶安全与低碳智能控制科技创新团队”资助项目(2010年);山东省教育厅科研资助项目(J10LG53)
通信作者:周风余(1969-),男,山东沂南人,博士,教授,从事机器人、船舶运动控制等方面的研究;电话:0531-88392115;E-mail: zhoufengyu@sdu.edu.cn

