��ν½�ʽ���Ӳ��ϵͳ��ģ�붯��ѧ����
�� ������������������
(�����Ƽ���ѧ ��ľ�뻷������ѧԺ��������100083)
ժ Ҫ��Ϊ�˼�����ɿ�ϵͳ�����ܵ��������Ӵ���Ӧ������������Ӧ��������С���ڹܱ��ڵĴ��ݣ�������½�ͷ�����Ӳ�ܽ������ӣ����ԭ�е��������ӡ��������Զ���ϵͳ����ѧ���ۣ�������ν½�ʽ���Ӳ��ϵͳ���˶�ѧģ�ͣ��ֱ���ġ��������������ϵͳ�ĺ����˶�������ֵģ�⡣����������ѧ�������ۣ�����1?100���ϵͳʵ��ϵͳ��ͨ��ʵ����֤��ѧģ�͡��о�������������������½½�ʽ���ϵͳˮ�µ�1��������������Ϊ322 kN?m����������ϵͳ��������Ϊ1.890 MN?m���½�ʽ���ϵͳ�У���1���ܵ��������������Ϊ4.79 mm��Ӧ�����Զ���ϵͳ����ѧ�����������½�ʽ���ϵͳ�ǿ��еģ���Сϵͳ��أ��½�ʽ���ϵͳ�������ڹ̽�ʽ���ϵͳ���������ζ�ϵͳ�˶�Ӱ���С��
�ؼ��ʣ����ϵͳ���½ӣ����Զ���ϵͳ����ѧ�������˶�����ֵģ��
��ͼ����ţ�P751��TH122��TB126 ���ױ�ʶ�룺A ���±�ţ�1672-7207(2008)03-0560-06
Modeling and dynamics analysis of multiple articulated lifting system
XU Yan, ZHANG Wen-ming, FENG Ya-li
(School of Civil and Environment Engineering, University of Science and Technology Beijing, Beijing 100083, China)
Abstract: To reduce stress concentration and bending stress on the screw joint, and decrease vibration transmission through the pipes, spherical joint was used to connect lifting pipes to replace screwed connection in lifting pipes of deep-sea mining system. Based on dynamics of flexible multi-body systems, the mechanics model of articulated lifting system was established. Under the four-grade and six-grade oceanic conditions, dynamic responses of lifting system were simulated. Based on the fluid mechanics and similarity theory, experiment model of lifting system with the scale of 1?100 was established to verify mechanics model. The results show that the maximum moment of flexion is 322 kN?m on the first pipe under six-grade condition in the articulated system. The maximum moment of flexion is 1.890 MN?m in the fixed one. The maximum bending deformation is 4.79 mm on the center of first pipe in articulated system. It is feasible to analyze articulated lifting system by applying theory of flexible multi-body dynamics. Articulated lifting system is better than fixed one on reducing moment of flexion clearly. And deformation has a little effect on the motion of the system.
Key words: lifting system; articulate; flexible multi-body dynamics; lateral movement; numerical simulation
��ɿ�ϵͳ�У����ϵͳ��Ҫ�ɹ���װ�á��������ܡ��м�ա������á��������ܵ������[1]�����Ӳ��ϵͳ�ɶ���ܵ���ɣ�Ϊ�˱���װж����������������[2]���������ϵͳ�ں�ˮ�г������ɲɿ���ҡ����ҡ�������Լ����������˵ȵ����ã����ֳ����ӵĶ���ѧ����[3]���ܶ��о��߶����ϵͳ���˶����Խ������о����磺P. Bar-Avi[4]�ý����������˵�ֱ�����Ӳ�������������µĺ�����K. H. Kim��[5]����ģ̬���ӷ�����ϵͳ�����Ӳ�ܿ��dz��������������������ʤ��[6]����٤�ɽ�(Galerkin)�����Դ��м��������Ľ���ʽ���Ӳ�ܵĺ���ƫ�ƽ��н�ģ�����ָ������ӵ����ϵͳ���ܴܺ������Ӧ�������Ӳ�λ���׳���Ӧ�����С�Ӧ����ʴ��Ӱ��ܵ�ϵͳ��ǿ�ȡ�
Ϊ�˼����ܵ��������Ӵ���Ӧ������������Ӧ��������С���ڹܱ��ڵĴ��ݣ�������½�ͷ�����Ӳ�ܽ������ӣ����ԭ�еĸ������ӣ�ֻ���ϵͳ��2���ؼ�λ�ý��з������Ϳ���˵�����ϵͳ���˶����ɡ������ϵͳ�У������м�յ���״��ͬ�����Ӳ�ܣ��ڷ����������Ϊ�ؼ�λ�ý����������ڴˣ��������������Զ���ϵͳ����ѧ���ۣ�������ν½�ʽ���ϵͳ����ѧģ�ͣ��о��������ϵͳ���˶����ԡ�
1 �о������붯��ѧ��ģ
ͼ1��ʾΪ��½�ͷ�ṹ�������ϡ��½�ͷ���Ӽ��Ϳ��������ӵ���ʽ[7]�����Ʋ��ֲ���API(American Petroleum Institute)��[8]��������֬�ܷ⣬����Ч��ֹ���Ӳ�������ʵ���©[9]����������½�ͷӦ�������Ӳ��֮�䣬���ϵͳ�ɿ�����������Ϲ��ߡ���Ӧ���������շ���[10]�Խ½�ʽ���ϵͳ���ж���ѧ��ģ��

ͼ1 ��½�ͷ�ṹ
Fig.1 Spherical joint structure of lifting system
1.1 �����������õ�Һ����
�����Ͳ���ˮ�ʵ���ٶȲ�����ҷ��������ˮ�ʵ�ļ��ٶȲ���������������ʵ�ʺ�����ú����ٶȺͲ���ˮ�ʵ���ٶȺͼ��ٶȣ����貨��Ϊ���Բ�������Ī��ɭ����(Morison)�����������������ϵͳ���غ�[11]��
���ҹ������Ŀ���������������Ϊ0.772 m/s����������Ϊ0.15 m/s����������[12]��������y���ĺ����ٶȹ�ʽ��

����Ī��ɭ���̣��������ܵIJ����غ�Ϊ��
1.2 ���Ӳ�ܵı���
���Զ���ϵͳ�������Բ������������β��ɺ��ԡ����ý½ӽ�ͷ�������Ӳ�ܣ���������ͷ֮��Ĺܵ�Ԫ������Ϊ��֧�����ں�����������Һ���������£���������������Ҳ�м��������Ӳ�ܵ�Ԫ��Ϊ11 m���⾶Ϊ0.219 m������Զ�����⾶�����ԣ��������������ε�Ӱ����Ժ��ԡ��������Ӳ���е�������һ������Fsin(wt)���������߷���[10]Ϊ��
��ʽ(3)���Կ������߽�ģ̬��Ӱ��Ѹ��˥�����ڷ���ϵͳ��������ʱ�����Ӳ�ܵ����ͽ�ȡ��1��ģ̬���ɵó�����ֵ��
1.3 ��������
���������˶������壬��������Ķ��ܺ���Χ����Ķ��ܶ���ʱ����仯����Χ����ĸ��������ڴ�ʱ���������������������[13]��
����ɿ�ϵͳ�У����ϵͳ���˶������һ��ɢ���ٶ��ƣ�ʹ��Χ�ĸ������������ı��˶�״̬�����ı����ٶȳ��ķֲ���ʹ���ϵͳ�ܵ�1������ˮ�����غ����á�
���貨�������롢����ѹ���ģ������˶��������ġ��������ڲ���ѹ�������������˶�ʱ���丽������ֻ������ļ�����״�йأ������������˶�״̬�ء����Ӳ�ܹ��嵥λ���ȸ�������Ϊ (���У�
(���У� Ϊ��ˮ�ܶȣ�rΪ����뾶)��
Ϊ��ˮ�ܶȣ�rΪ����뾶)��
1.4 ��ѧ��ģ
����2�����Ӳ��֮���Լ��Ϊ�����ʽ��ÿ�ι��������ߵļн�Ϊ��i(i=1, 2, ��, n-1, n)����ͼ2��ʾ������ϵͳ�����������˼�����������������(�ݲ����Ǵ����˶�����������ļ���)�����Ҽ�����z����û���˶��������ϵͳ�ɿ������ڶ�ά�ռ������Լ�����˶�ϵͳ����O���ڴ�ֱƽ���ڰڶ���ѡȡ��Ϊ�������꣬��x-yƽ���ڽ����������ն���ѧ���̡�
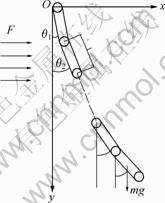
ͼ2 ���ϵͳ�ļ�ģ��
Fig.2 Simplified model of lifting system
����1 km��ɿ���ϵͳ�½�ʽ���ϵͳ����ÿ�ιܳ�Ϊl������Ϊm���½ӽ�ͷ����ΪM����300 m��900 m���ֱ��װ�����ú��м�ա������ú��м����ˮ�е������ֱ�Ϊ6.077 0 t��2.170 5 t��
Ϊ�������Ӳ���ڱ�����ʱ������ת���������Ӳ��֮������������ӣ��м�������Ӳ�ܲ��á�ʮ����������װ�á���ʼ����Ϊ����i(0)=0�� ������������4�����������в���Ϊ2.5 m������Ϊ8 s��6�����������в���Ϊ4 m������Ϊ10 s��
������������4�����������в���Ϊ2.5 m������Ϊ8 s��6�����������в���Ϊ4 m������Ϊ10 s��
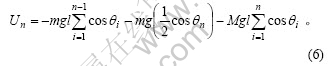
���������У���Ϊÿ���ܶ�Ҫ�������ڴ�ֱƽ���ڰڶ�����ת������ΪI����ܵĶ���Ϊ��

��ͷ�Ķ���Ϊ��

ϵͳ�������ܿ��Ա�ʾΪ��
�������ϵͳ�غɷ����ͳ�ʼ�����������������շ��̣������ַ����顣
�������þ������ʽ��ʾΪ��
�����е�Ԫ�ظ�������������������ʼ������ȷ�����ǽ�ͷ�����Ӳ�ܵ���������ˮ�ĸ������������ϵĿ���նȵȲ�������ϱ���ʽ��nΪӲ��������ÿ�����Ӳ�ܵij���Ϊ11 m������ϵͳ����Ҫ82�Ρ����ġ����������£�ϵͳ���˵IJɿ����ܵļ����ֱ�Ϊ1 877.81sin (2��t/8)��3 810.17sin (2��t/10)��
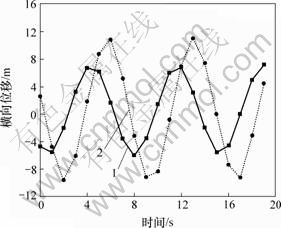
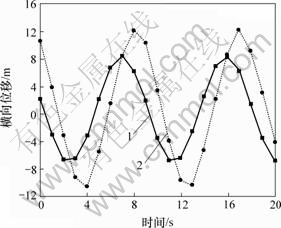
�������Ϸ���������MATLAB�����ֱ���ġ����������£��ü��м�յĺ����˶�������ֵģ�⣬�����ͼ3��ͼ4����ͼ3��֪�����ļ������£��ú��м�յ�������λ�Ʒֱ�Ϊ8.0 m��12.6 m����ͼ4��֪�����������£��ú��м�յ�������λ�Ʒֱ�Ϊ9.7 m��13.5 m�����߶������ڱ仯�������ڳ�����һ���ͺ�������Ϊ�˶����ݵ��ú��м����Ҫһ��ʱ�䡣
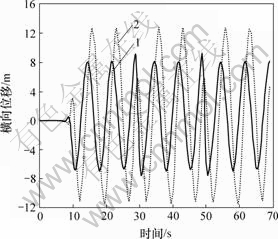
1���ã�2���м��
ͼ3 �ļ����������ϵͳ����λ�Ƽ�����
Fig.3 Computed results of lateral displacement of lifting system under four-grade condition
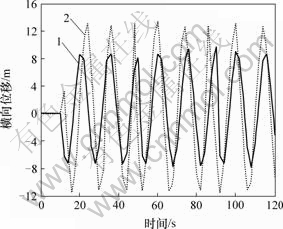
1���ã�2���м��
ͼ4 �������������ϵͳ����λ�Ƽ�����
Fig.4 Computed results of lateral displacement of lifting system under six-grade condition
2 ʵ����֤
����������ѧ�������ۼ����ٷ���[14]������1?100���ϵͳʵ��ģ�͡�ͨ�����һ����������˶�ģ�Ⲩ�ˣ����������Ӳ��ģ���˶�������ģ�⺣�������Ӳ�ܵ���ѧ���ԡ�
ʵ��ϵͳ��Ҫ���������һ���(����ģ��ɿ��˶�)������ϵͳ�����ֲɼ�ϵͳ��һ���½����ӵ����Ӳ��ģ����ʵ����о����������һ�������������ϵͳ�������첽����ͱ�Ƶ����ɣ���Ҫ�豸����������������ͺ�Y112M-4������Ϊ4 kW���ת��Ϊ1 500 r/min��������Ϊ˫����һ�����٣�������Ϊ11�����ͺ�ΪA��4������Ƶ���ͺ�Ϊ��CIMR-F7A�����ֲɼ�ϵͳ�����ֲɼ�����ͬ������ͷ��ɣ����ֲɼ����ͺ�Ϊ�м�T1500������ͷ�ͺ�ΪDV-2410CDW��
ʵ����װ��ˮ���л�����ԲͲ�ڽ��С�ԲͲֱ��Ϊ1 m���ܸ߶�Ϊ10 m���˶�����ͨ�����ڱ�Ƶ�������Ƶ�����ı䡣�˶�λ��ͨ�����ֲɼ���������ͷ�ɼ�������ͷ�����ֲɼ����������������ڼ�����϶����ݽ��з���[15]��
�ӵ綯�����ݵ����һ�����ת��Ϊ��
�Խ½�ʽ���ϵͳ���ġ����������µ��˶�����ʵ��ģ�⡣���ļ������£����ϵͳ��ʵ������ͼ5���������������ϵͳ��ʵ������ͼ6����ͼ5��֪���ú��м�յ�������λ�Ʒֱ�Ϊ7.2 m��11.1 m����ͼ6��֪���ú��м�յ�������λ�Ʒֱ�Ϊ9 m��13 m��
�Ա�ͼ3��ͼ5��ͼ4��ͼ6��֪����ֵģ����ʵ���������һ����ƫ���ԭ�����Ϊ��ʵ����õĽ���Ϊˮ����ʵ�ʺ�ˮ�������ϵͳ����ѧģ�ͽ����˼����Ҽ����ģ��ʱ�ļ��㲽�����ܾ�ȷȷ������������ʱ������Ϊ����������˵����������ʵ��ģ��������ͬ�����������˵������ģ������ȷ�ġ�
�����������£�ˮ�µ�1���ܳ�������ϵͳ������������Һ�����ڴ˴�������ԣ���������Ҳ�����ġ������Ƚϸ�������ϵͳ��½�����ϵͳ��ͬһ�������˶�ʱ���ܵ���ؼ�ͼ7����ͼ7(a)��֪���������ӵ����ϵͳ������ͬ�����£�ˮ�µ�1���ܵ�������Ϊ1.890 MN?m�������ֻ��1.875 MN?m�����仯�����½����ӵ����ϵͳ��ˮ�µ�1���ܵ�������ֵΪ 322 kN?m(��ͼ7(b))����Ӧ������Ӧ��Ϊ312 MPa����������Ӳ�ܵIJ��Ϻͽṹ���ǽϰ�ȫ�ġ��ɴ˿�֪���½�ʽ���ӿ��Լ�Сϵͳ������أ������ں���ʵ����ҵ��
1���ã�2���м��
ͼ5 �ļ����������ϵͳ����λ��ʵ����
Fig.5 Experimental results of lateral displacement of lifting system under four-grade condition
1���ã�2���м��
ͼ6 �������������ϵͳ����λ��ʵ����
Fig.6 Experimental results of lateral displacement of lifting system under six-grade condition

(a) �����������ϵͳ��(b) �½��������ϵͳ
ͼ7 ����������ʱ��ͬ���ϵͳ��1���ܵ��������
Fig.7 Moment of flexion on the first pipe in different lifting systems under six-grade oceanic condition
ͼ8��ʾΪ���Ӳ�ܵ�Ԫ��ijһʱ�̵����������������������ǵ�1���ܣ�������Ϊ4.79 mm���������������Ϊ0.5~1.5 mm����������С��˵���������ζ�ϵͳ�˶�Ӱ�첻��
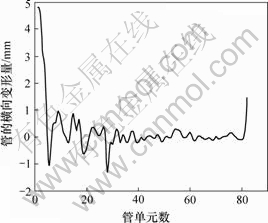
ͼ8 �������������Ӳ�ܵ�Ԫ�е�������������
Fig.8 Bending deformation curve of pipes under six-grade condition
3 �� ��
a. �������Զ��嶯��ѧ���ۣ����Ǻ����˶��в����ĸ���������������ν½�ʽ���Ӳ��ϵͳ���˶�ѧģ�ͣ������ġ��������������ϵͳ���˶�������ֵģ�⡣���ļ������£��ú��м�յ�������λ�Ʒֱ�Ϊ8.0 m��12.6 m�������������£��ú��м�յ�������λ�Ʒֱ�Ϊ9.7 m��13.5 m��
b. �����������۽�����ʵ��װ�ã������ġ��������������ϵͳ�ĺ����˶�����ʵ��ģ�⡣ʵ����Ϊ�����ļ������£��ú��м�յĺ���λ�Ʒֱ�Ϊ7.2 m��11.1 m�������������£��ú��м�յ�������λ�Ʒֱ�Ϊ9 m��13 m����������ʵ�����仯������ͬ����ȥ������أ�2�ֽ�����������˵��Ӧ�����Զ���ϵͳ����ѧ���۷����½�ʽ���ϵͳ�ǿ��еġ�
c. �����������£����ϵͳ��ˮ�µ�1�������ܵ�������Ϊ322 kN?m�����ڸ������ӵ����ϵͳ�����1���ܵ�������Ϊ1.890 MN?m��˵���½�ʽ���ӿ��Լ�Сϵͳ���ܵ���أ���1���ܵ��������������Ϊ4.79 mm���������������Ϊ0.5~1.5 mm����ϵͳ���˶�Ӱ�첻�˽��ۿ�Ϊ�о�1 km�½�ʽ�������ϵͳ���к��Ͽ���(����)�ṩ�������ݡ�
�ο����ף�
[1] Chung J S, Whitney A K. Flow-induced moment and lift for a circular cylinder with cable attachment[J]. International Journal of Offshore and Polar Engineering, 1993, 3(4): 280-287.
[2] Chung J S, Cheng B R. MSE and FEM modeling of thrusts to elastic joints of long vertical pipe in 3-D nonlinear motions[J]. International Journal of Offshore and Polar Engineering, 1999, 9(2): 117-125.
[3] CHENG Bao-rong, HOU Zhi-chao, ZHENG Zhao-chang. Improved discrete element method for linear and nonlinear dynamic analysis of 3-D beam structures[J]. Tsinghua Science and Technology, 1997, 2(2): 529-535.
[4] Bar-Avi P. Dynamic responses of risers conveying fluid[J]. Journal of Offshore Mechanics and Arctic Engineering, 2000(122): 188-193.
[5] Kim K H, Choi H S, Seong W J, et al. Dynamic positioning control for the buffer of a deep-sea mining system using FIR filter[C]//Proceeding of the Eleventh International Offshore and Polar Engineering Conference. Stavanger, Norway, 2001: 17-22.
[6] �� ʤ, Ф�־�, ���ͻ�, ��. ��ɿ�ϵͳ�˶�״̬�Ͷ�̬����Ӱ�����ط����о�[J]. �й����̿�ѧ, 2002, 4(3): 78-83.
LING Sheng, XIAO Lin-jing, SHEN Yan-hua, et al. A study of the factors influencing the kinematic condition and dynamic characteristics of deep seabed mining systems[J]. Engineering Science, 2002, 4(3): 78-83.
[7] FENG Ya-li, ZHANG Wen-ming, FENG Fu-zhang. Design and strength analysis of a spherical connector for lifting subsystem in deep sea mining system[J]. China Ocean Engineering, 2006, 20(4): 605-173.
[8] �� �P, ������, ����, ��. APIԲ�����ܽ�ͷӦ�����ֲ�����[J]. �����Ƽ���ѧѧ��, 2002, 24(12): 555-558.
WANG Li, ZHANG Ru-xin, ZOU Jia-xiang, et al. Experimental research of stress field distribution on API round thread casing connection[J]. Journal of University of Science and Technology Beijing, 2002, 24(12): 555-558.
[9] ������, �븣�, ������, ��. �����½�ͷ�����ƻ��Ѽ�֬�ܷ����ܷ���[J]. �����ܷ�, 2006(12): 128-131.
FENG Ya-li, FENG Fu-zhang, ZHANG Wen-ming, et al. Thread off and thread compound performance analysis for the spheric joint of deep sea bed mining lifting system[J]. Lubrication Engineering, 2006(12): 128-131.
[10] ½�ӷ�. ���Զ���ϵͳ����ѧ[M]. ����: �ߵȽ���������, 1993.
LU You-fang. Dynamics of flexible multibody systems[M]. Beijing: Higher Education Press, 1993.
[11] ������. ���̲�����ѧ[M]. ���: ����ѧ������, 1991.
ZHU Yan-rong. Ocean engineering wave mechanics[M]. Tianjin: Tianjin University Press, 1991.
[12] Aso K, Kan K, Doki H. Experiment for optimum buffer damping in reducing longitudinal vibration of a long pipe string[J]. International Journal of Offshore and Polar Engineering,1997, 7(2): 104-110.
[13] ������, ������. �ߵ�������ѧ[M]. �人: ���пƼ���ѧ������, 2003.
WANG Xian-fu, XIONG Ao-kui. Advanced fluid mechanics[M]. Wuhan: Huazhong University of Science and Technology Press, 2003.
[14] ������, ʢ����, ���Գ�, ��. ��СԲ��Բ�����������嶯��ϵ�������о�[J]. �й��촬, 2001, 42(2): 19-25.
YI Qi-le, SHENG Qing-wu, YANG Xian-cheng, et al. Experimental study on fluid dynamic coefficients of circular cylinders with small tubes in oscillating flow[J]. Shipbuilding of China, 2001, 42(2): 19-25.
[15] �� ��, ������, �븣�, ��. 1000����ɿ�����ϵͳ�½������ϵͳʵ�����[J]. ��ұ����, 2005, 25(12): 50-52.
XU Yan, FENG Ya-li, FENG Fu-zhang, et al. Experimental design of articulated lifting system of 1 000 meters�� pilot-scale mining system[J]. Mining and Metallurgical Engineering, 2005, 25(12): 50-52.
�ո����ڣ�2007-07-04�������ڣ�2007-09-06
������Ŀ�����ҽ�������ʿ�����������Ŀ(20060008025)�����ҳ�Զ��չר������ʺ��������о�������ʮ�塱��Ŀ(DY105-03-02-17)
ͨ�����ߣ��� ��(1975-)��Ů��ɽ��̫ԭ�ˣ���ʿ�о��������¸���ϵͳ��ѧ��Ϊ�о���E-mail: beijingxuyan@163.com

