DOI: 10.11817/j.issn.1672-7207.2018.11.009
气动伺服系统的摩擦力与死区参数辨识及控制
孟凡淦,陶国良,王帮猛,陶俊,陈烨
(浙江大学 流体动力与机电系统国家重点实验室,浙江 杭州,310027)
摘要:为了精确描述气缸的摩擦力,实现气缸的高精度轨迹跟踪控制,并提高算法的可移植性,提出基于遗传算法的气缸LuGre摩擦模型参数辨识方法和基于气缸充气腔压力变化的比例方向阀死区辨识方法。通过仿真分析,验证遗传算法在辨识摩擦力静动态参数时的可靠性;以单缸气动伺服系统为研究对象,分别建立比例方向阀和气缸的数学模型,设计基于反步法的非线性鲁棒控制器,开展气缸活塞运动跟踪不同频率的正弦轨迹曲线和三阶加减速曲线实验。研究结果表明:基于遗传算法的摩擦力参数辨识和基于气缸压力变化的比例方向阀死区辨识方法均能获得精确的辨识结果,本文所设计的控制器能实现气缸高精度轨迹跟踪控制。
关键词:气动伺服系统;LuGre摩擦力辨识;死区辨识;遗传算法;非线性鲁棒控制;轨迹跟踪控制
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2018)11-2700-09
Identification and control of friction parameters and dead zone parameters of pneumatic servo system
MENG Fangan, TAO Guoliang, WANG Bangmeng, TAO Jun, CHEN Ye
(State Key Laboratory of Fluid Power & Mechatronic Systems, Zhejiang University, Hangzhou 310027, China)
Abstract: To describe the friction and track trajectory of cylinder precisely and improve the portability of the control strategy, a method of parameter identification based on genetic algorithm for LuGre friction model of pneumatic cylinder and a method of dead zone identification for proportional directional valve were proposed. The reliability of genetic algorithm in identifying static and dynamic parameters of friction was verified by simulation test. Mathematical models of single cylinder and proportional directional valve were established, and the robust controller based on the backstepping method was designed. Experiments were conducted to track sinusoidal trajectory with different frequencies and three order accelaration and decelaration trajectory. The results show that accurate results can be obtained from methods of parameter identification for LuGre friction and dead zone of proportional directional valve, and trajectory tracking control with high precision can be achieved from the designed robust controller.
Key words: pneumatic servo system; LuGre friction; dead zone identification; genetic algorithm; non-linear robust control; trajectory tracking control
气动系统具有功率-质量比大、清洁、成本低、维护方便等优点,已被广泛应用于自动化生产线、医疗机械以及机器人等领域[1]。但由于气动系统存在强非线性和模型不确定性,导致难以建立精确的数学模型和实现高精度的轨迹跟踪控制,具有高精度轨迹跟踪性能的气动位置伺服控制系统仍然是当前气动技术的重要研究方向。气缸的摩擦力是造成系统具有强非线性的主要因素之一,特别是在气缸低速运动时,摩擦力的影响尤为明显。因此研究其特性并实现精确的摩擦力补偿对于高精度的伺服控制具有重要意义[2-3]。黄俊等[4]对比了库仑摩擦力模型、库仑+黏滞摩擦力模型、静摩擦+库仑摩擦+黏滞摩擦力模型以及Stribeck摩擦力模型,认为Stribeck摩擦力模型能较好地描述气缸低速运动中的摩擦力。为了进一步提高气缸运动精度,人们开始运用LuGre动态摩擦力模型进行气动伺服控制的研究。陈剑锋等[5-6]辨识了气缸的LuGre摩擦模型中的静态参数和动态参数,辨识过程需要利用伺服电机控制气缸的运动,且在动态辨识时需测量气缸微小的预滑移,这对位移传感器的精度提出了较高的要求。SHANG等[7]在3-RPS气动伺服平台的控制中,使用以气缸活塞速度为输入的近似函数表示气缸摩擦力,使用最小二乘法在线辨识近似函数中的参数,但近似函数不能完全表征气缸摩擦力,且参数收敛速度慢。比例方向阀死区是影响其流量特性的重要因素,由于加工与装配误差,同一型号、不同批次的阀的死区有显著差异。针对死区辨识,刘延俊[8]通过神经网络在线学习调整控制电压的修正量,减少比例阀在死区附近的停留时间,从而减小死区对控制精度的影响;刘大华[9]通过观察比例阀阀口压力的动态变化来辨识液压比例阀的死区,该方法更加简便可靠。关于气动伺服控制算法,CHO[10]使用神经网络辨识并补偿系统的非线性,提出PID(比例-微分-积分控制器)+神经网络的控制策略;TAGHIZADEH等[11]设计了一种多模型的PD(比例-微分)控制器,可用于负载在较大范围内变动的气动伺服系统。但上述PID控制以及PID与神经网络、模糊控制等智能算法相结合的控制方式取得的控制效果一般。国内外研究者也尝试使用非线性控制算法。LEE等[12]建立基于正交小波的系统模型,由李雅普诺夫定律构造了各级小波的自适应律,并设计了具有强鲁棒性的自适应滑模控制器;GULATI等[13]基于神经网络理论建立了系统模型,并基于反步法提出气动伺服控制策略,在跟踪频率为 0.5 Hz的正弦曲线时的平均误差为2.1 mm。自适应控制、滑模控制、鲁棒控制等非线性控制策略能够充分利用模型信息,一般能够取得较好的控制效果。本文作者使用LuGre摩擦力模型来描述气缸摩擦力,并将气缸活塞运动速度看作是摩擦力模型的函数变量,采用遗传算法辨识气缸摩擦力参数;建立比例方向阀死区模型,基于气缸充气腔内的压力变化辨识阀的死区;设计非线性鲁棒控制器,研究有摩擦力补偿和死区补偿的气缸轨迹跟踪性能。
1 LuGre摩擦力模型及辨识仿真
1.1 LuGre摩擦力模型
长期以来,人们进行了大量研究,以期获得准确的数学模型来描述复杂的摩擦现象。LuGre模型已被证实可以描述摩擦现象中的摩擦力黏-滑运动、摩擦滞后、预滑移、最大静摩擦力以及稳态振荡环等大部分的静态过程和动态过程[5]。该模型认为摩擦力由接触面上的弹性鬃毛之间的相互作用而产生。以状态变量z表示弹性鬃毛的平均变形,该模型可以表示为
 (1)
(1)
式中:函数 用来描述Stribeck效应,
用来描述Stribeck效应, 为两表面的相对滑动速度;
为两表面的相对滑动速度; 为鬃毛的刚度;
为鬃毛的刚度; 为鬃毛的微观阻尼系数;B为黏性摩擦因数;Fc为库仑摩擦力;Fs为最大静摩擦力;
为鬃毛的微观阻尼系数;B为黏性摩擦因数;Fc为库仑摩擦力;Fs为最大静摩擦力; 为Stribeck速度;z为变形量;
为Stribeck速度;z为变形量; 为变形速度;和分别为弹性鬃毛的变形以及变形速度对摩擦力的影响,属于动态摩擦参数;Ff为LuGre摩擦力;B,Fc,Fs和为静态摩擦参数。
为变形速度;和分别为弹性鬃毛的变形以及变形速度对摩擦力的影响,属于动态摩擦参数;Ff为LuGre摩擦力;B,Fc,Fs和为静态摩擦参数。
虽然LuGre模型最大限度地体现了摩擦的真实性,但存在难以测量气缸在预滑移阶段弹性鬃毛的微变形量z和变形速度 的问题。本文作者将z和作为模型的中间变量,认为摩擦力可以表示为活塞运动速度的单输入函数。将式(1)进行离散化后的模型可以表示为
的问题。本文作者将z和作为模型的中间变量,认为摩擦力可以表示为活塞运动速度的单输入函数。将式(1)进行离散化后的模型可以表示为
 (2)
(2)
式中:k为采样点;t为采样时间; 为静动态参数向量,=
为静动态参数向量,=  。
。
1.2 LuGre摩擦力参数辨识仿真
使用遗传算法辨识气缸LuGre摩擦力模型参数,为了验证遗传算法的可行性以及调试遗传算法参数以便在后续的气缸摩擦力参数辨识实验中使用,进行摩擦力辨识仿真分析。遗传算法具体步骤如下。
1) 编码。采用浮点数编码方式,定义种群数量为H,待辨识的参数的个数为D,生成H×D的浮点数矩阵。
2) 选择。采用锦标赛选择法,每次从种群中随机取出一定数量的个体,然后选择其中适应度最好的个体放入子代种群,重复该操作,直到新的种群规模达到原来的种群规模。
3) 交叉。使用单点交叉,随机产生交叉位置,2个个体在交叉点位置互换部分基因码,产生2个子个体。
4) 变异。为了避免过早收敛,在一定的概率条件下对基因进行变异。
定义误差函数 为
为
 (3)
(3)
式中: 为目标摩擦力;
为目标摩擦力; 为迭代过程中由辨识出的参数计算得到的摩擦力。
为迭代过程中由辨识出的参数计算得到的摩擦力。
定义离散采样点的个数为N,适应度函数J为
 (4)
(4)
假设采样时间t=0.001 s,
 (5)
(5)
利用式(5)中代入式(2)得到LuGre摩擦力,将作为为目标值来辨识静动态参数。
设置遗传算法参数如下:种群数量H=60个,每个个体的基因长度D=6,演化代数T=2 000,锦标赛选择规模C=6,交叉算子P=0.7,变异算子Q=0.13;设置待辨识参数的搜索范围 [0, 200],
[0, 200], [0, 200],
[0, 200], [0, 1],
[0, 1], [0, 20],
[0, 20], [0, 2 000],
[0, 2 000], [0, 2 000]。
[0, 2 000]。
LuGre摩擦模型中参数理论值和辨识值如表1所示。由表1可知:参数的辨识值与给定值非常接近,最小相对误差为0.11%,最大相对误差为4.4%,辨识误差在可接受的范围内,由此可知该遗传算法以及遗传算法参数在LuGre摩擦力参数辨识中是有效、可行的。
表1 LuGre摩擦模型中参数理论值和辨识值
Table 1 Theoretical values and identification values of parameters for LuGre friction model

2 比例方向阀死区模型与辨识
保持上游压力为0.6 MPa,下游压力为0.3 MPa,在精密流量实验台上测量2个同一型号、不同批次的比例方向阀在不同电压下的流量特性。测量结果如图1所示。由于2个阀的加工装配误差导致死区差异,造成其流量曲线存在电压方向上的偏移。为了避免对每个比例方向阀进行繁琐的流量特性测试,提高控制算法的可移植性,对比例方向阀的死区进行辨识显得尤为重要。

图1 阀口质量流量与控制电压关系
Fig. 1 Relationship between mass flow of valve port and input signal
使用激光位移传感器测量3个同一型号、不同批次的比例方向阀在不同控制电压下的阀芯位移,结果如图2所示。由图2可知:阀芯位移与控制电压之间呈线性关系,但由于阀的中位死区的影响,阀芯的位移并不等于阀口的轴向开度L,因此,可以建立如图3(a)所示的死区模型来描述阀口轴向开度与控制电压之间的关系,死区模型的表达式为
 (6)
(6)
式中:K为斜率;u为电压; 和
和 分别为正向和反向死区电压。对比例方向阀的死区进行辨识,以辨识正向死区电压为例,以中位电压5 V为起点,以 0.02 V为增量逐渐增大控制电压,当气缸充气腔的气压显著变化时,记录此时电压
分别为正向和反向死区电压。对比例方向阀的死区进行辨识,以辨识正向死区电压为例,以中位电压5 V为起点,以 0.02 V为增量逐渐增大控制电压,当气缸充气腔的气压显著变化时,记录此时电压 ,并多次测量取平均值;在获得死区电压后,可通过构造如图3(b)所示的死区模型的逆模型对死区进行补偿,死区的逆可以表示为
,并多次测量取平均值;在获得死区电压后,可通过构造如图3(b)所示的死区模型的逆模型对死区进行补偿,死区的逆可以表示为

图2 比例方向阀的阀芯位移与控制电压的关系
Fig. 2 Relationship between spool displacement of proportional directional value and control voltage

图3 阀口轴向开度与控制电压的关系
Fig. 3 Relationship between axial orifice opening of valve port and control voltage
 (7)
(7)
为了验证上述气缸摩擦力与控制阀死区辨识方法以及实现气缸高精度轨迹跟踪控制,搭建单缸气动伺服系统实验装置,如图4所示(其中x为位移,p为压力)。无杆气缸(DGC-25-500-G-PPV-A)由比例方向阀(MPYE-5-1/8-LF-010B)控制;气缸两腔的压力和比例方向阀进气口压力通过压力传感器(MPX5700)测量,压力测量精度为±1.25%;气缸活塞的位移通过拉杆式位移传感器(KTC600)测量,测量精度小于0.01 mm。将辨识算法和控制算法集成到DSP(数字信号处理器)控制器中,各传感器信号的读取与比例方向阀的控制由DSP控制器完成。

图4 气动伺服系统示意图
Fig. 4 Schematic map of pneumatic servo system
3 气动位置伺服系统建模
由牛顿第二定律可知,气缸在空载条件下,活塞的运动方程可以表示为
 (8)
(8)
式中:M为活塞的质量;A为活塞的横截面积;pa和pb分别为气缸左、右腔的压力; 为辨识摩擦力;
为辨识摩擦力; 为不确定非线性因素,如温度变化、泄露等干扰。
为不确定非线性因素,如温度变化、泄露等干扰。
建立比例方向阀模型。为了避免测量比例方向阀在不同阀口开度下的声速流导和临界压力比,本文参考文献[14]和[15],得到比例方向阀的流量特性表达式为

 (9)
(9)
式中:Gq为以pu,pd和Tu为变量的函数; 为气体的质量流量;W为阀口面积梯度;pu和pd分别为比例阀的上、下游绝对压力;Tu为上游气体热力学温度;pr为临界压力比;
为气体的质量流量;W为阀口面积梯度;pu和pd分别为比例阀的上、下游绝对压力;Tu为上游气体热力学温度;pr为临界压力比; 为出现层流时的压力;C1为常数,取为0.040 4;Cd为修正项,表示为上下游压力比的一次函数。
为出现层流时的压力;C1为常数,取为0.040 4;Cd为修正项,表示为上下游压力比的一次函数。
 (10)
(10)
假设气缸内的气体为理想气体,建立气缸两腔的压力微分方程。参考文献[16],得到气缸两腔的压力微分方程为
 (11)
(11)
式中:i为a和b,分别表示气缸的左、右腔;Ti和pi分别为气缸左、右腔的温度和压力;Ts为进气温度;ps为进气压力;pbal为阀芯在中位时气缸两腔的平衡压力;n为多变指数; 为空气比热;R为理想气体常数;
为空气比热;R为理想气体常数; 和
和 分别为流进气缸和流出气缸的气体质量流量;
分别为流进气缸和流出气缸的气体质量流量; 为缸内气体与外界的热交换;
为缸内气体与外界的热交换; 为模型中的不确定非线性因素。
为模型中的不确定非线性因素。
综合式(8)、式(9)和式(11),并定义状态变量 ,单缸气动系统的模型可以表示为
,单缸气动系统的模型可以表示为
 (12)
(12)
4 非线性鲁棒控制器设计
控制器的设计目标是使系统实现高精度轨迹跟踪,但系统的模型是高阶非线性的,且存在不确定的非线性干扰,参考文献[17]和[18],采用反步法设计非线性鲁棒控制器。
4.1 压力层反步法推导
选择正反馈增益系数k1,定义轨迹跟踪的速度误差e2:
 (13)
(13)
式中:e1为轨迹跟踪误差, (其中,x1为实际轨迹,x1d为目标轨迹);x2为实际速度;x2eq为考虑跟踪误差后的估计速度,
(其中,x1为实际轨迹,x1d为目标轨迹);x2为实际速度;x2eq为考虑跟踪误差后的估计速度,

 。e2与e1之间的传递函数
。e2与e1之间的传递函数 ,当e2趋近0时,e1也将趋近于0。对式(13)中的e1,e2,
,当e2趋近0时,e1也将趋近于0。对式(13)中的e1,e2, ,x2和x2eq微分并与式(12)中的第2个方程结合可得:
,x2和x2eq微分并与式(12)中的第2个方程结合可得:
 (14)
(14)
将 作为控制器虚拟输入,为使e1趋近于0,只需通过设计控制器虚拟输入使得e2趋近于0。
作为控制器虚拟输入,为使e1趋近于0,只需通过设计控制器虚拟输入使得e2趋近于0。
基于李雅普诺夫稳定性原理,定义半正定函数V2为
 (15)
(15)
结合式(14),并对V2微分可得:
 (16)
(16)
设计期望的控制器虚拟输入 为
为
 (17)
(17)
式中:k2为正反馈增益; 为模型的补偿项;
为模型的补偿项; 和
和 为鲁棒反馈项,用于抑制模型中不确定非线性的影响。令
为鲁棒反馈项,用于抑制模型中不确定非线性的影响。令 ,表示控制器虚拟输入的压力误差,将式(17)代入式(16)可得
,表示控制器虚拟输入的压力误差,将式(17)代入式(16)可得
 (18)
(18)
系统的不确定非线性是有界的,其上界可以表示为光滑函数 :
:
 (19)
(19)
根据滑模控制理论,将定义为
 (20)
(20)
式中: 为边界层厚度。选择适当的,使该鲁棒反馈项满足如下条件:
为边界层厚度。选择适当的,使该鲁棒反馈项满足如下条件:
 (21)
(21)
将式(21)中第1个条件代入式(18)可得:
 (22)
(22)
当e3=0时,式(22)可以表示为
 (23)
(23)
此时e2是收敛的,其收敛域可通过减小或增大k2来减小。
4.2 流量层反步法推导
该步骤的设计任务是使e3趋近于0。将e3对时间微分,并与式(12)中的后2个方程结合可得

 (24)
(24)
式中:qL为进入气缸两腔的实际净流量,
 ;
; 为微分不可计算部分,由鲁棒反馈项抑制;
为微分不可计算部分,由鲁棒反馈项抑制; 为微分可计算部分,用于模型补偿设计,其表达式为
为微分可计算部分,用于模型补偿设计,其表达式为

 (25)
(25)
定义半正定函数V3为
 (26)
(26)
结合式(24),并对V3微分可得
 (27)
(27)
将 作为流层反步法推导中的控制器虚拟输入,其期望值可以表示为
作为流层反步法推导中的控制器虚拟输入,其期望值可以表示为
 (28)
(28)
式中:k3为正反馈增益; 为模型补偿项,
为模型补偿项, 和
和 为鲁棒反馈项。将式(28)代入式(27)可得
为鲁棒反馈项。将式(28)代入式(27)可得

 (29)
(29)
模型中的不确定非线性是有界的,其上界可以表示为光滑的函数 :
:
 (30)
(30)
与类似,将定义为
 (31)
(31)
式中: 为边界层厚度。选择适当的,使该鲁棒反馈项满足如下条件:
为边界层厚度。选择适当的,使该鲁棒反馈项满足如下条件:
 (32)
(32)
将式(32)第1个条件代入式(29),可得
 (33)
(33)
式中: 。式(33)的解为
。式(33)的解为
 (34)
(34)
由此可以得到向量 的上界为
的上界为
 (35)
(35)
由式(35)可知误差e2和e3是收敛的,从而可以得知误差e1也是收敛的,且其收敛域可通过参数k2,k3,和调整。
4.3 由流量获得阀口开度
由计算所得的 可以计算控制阀的轴向开度为
可以计算控制阀的轴向开度为

 (36)
(36)
然后,根据死区的逆(见式(7))来确定比例方向阀的控制电压。
5 实验结果
在基于DSP的控制器中实现上述摩擦力参数辨识算法和非线性鲁棒控制算法,遗传算法参数设置与该算法在仿真验证时的参数设置相同。模型参数设置如下:活塞质量M=1.89 kg,阀口面积梯度W=20.1 mm,气源压力ps=0.6 MPa,上游气体热力学温度Tu=290.15 K,临界压力比pr=0.29,层流时压力比=0.99,多变指数n=1.35,空气比热=1.4,理想气体常数R=287 J/(kg・K)。控制器参数设置如下:k1=40,k2=30,h2=20,=0.4,k3=10,h3=1 000,=2。
1) 辨识比例方向阀的死区电压。为了验证基于气缸充气腔压力变化的辨识方法的有效性,首先在精密流量测试实验台上测试比例方向阀的死区电压,分别为5.51 V和4.62 V。采用基于气缸充气腔压力变化进行比例方向阀死区辨识,辨识正向死区电压u+:以中位电压5 V为起点,以0.01 V为增量逐渐增大控制电压,死区电压为气缸充气腔内压力明显变化时的电压。比例方向阀死区辨识时气缸充气腔压力变化如图5所示。多次测量气压并取平均值得到正向死区电压u+=5.48 V。采用相同方法辨识反向死区电压:以中位电压5 V为起点,以-0.01 V为减量逐渐减小控制电压,多次测量气压并取平均值得到反向死区电压=4.65 V。由辨识结果可知:该辨识方法能够获得准确的死区电压。

图5 比例方向阀死区辨识时气缸充气腔压力变化
Fig. 5 Pressure change of cylinder charging chamber when identifying dead zone of proportional directional valve
2) 进行摩擦力参数辨识。使用没有摩擦力补偿项的鲁棒控制器,分别跟踪正弦曲线(幅值为0.125 m,频率为0.25 Hz)以及三阶加减速曲线(S曲线)。三阶加减速曲线轨迹如图6所示[19]。采集气缸活塞位移信号和两腔压力信号,使用非线性跟踪微分器[20]对位移信号进行微分和滤波,得到活塞运动的速度和加速度信号,采用Butterworth二阶低通滤波器对两腔压力信号进行滤波处理。
 (37)
(37)
式中: ,
, 和
和 分别为第k个采样点气缸左、右腔的压力和气缸活塞的加速度。
分别为第k个采样点气缸左、右腔的压力和气缸活塞的加速度。
以式(37)计算得到的摩擦力作为遗传算法的目标值。使用遗传算法辨识气缸摩擦力参数,跟踪正弦曲线时的参数辨识结果为Fc=13.76,Fs=42.4,=0.399,B=171.7,=990.1,=644。跟踪S曲线时的参数辨识结果为Fc=14.15,Fs =41.9,=0.397,B=170.5,=985.1,=648。由辨识结果可知:跟踪不同目标轨迹所获得的摩擦力参数基本相同,说明基于遗传算法的摩擦力参数辨识与目标曲线的选取无关。跟踪正弦曲线及S曲线时,目标摩擦力与辨识获得的摩擦力分别如图7和图8所示。由图7和图8可知:辨识出的摩擦力与目标摩擦力非常接近,也证明该方法是有效可行的。
基于上述比例方向阀死区和摩擦力参数辨识结果,使用有摩擦力补偿的非线性鲁棒控制器,跟踪幅值为0.125 m,频率分别为0.25和0.50 Hz的正弦曲线即0.125sin( )和0.125sin(
)和0.125sin( )以及S曲线,跟踪误差分别如图9~11所示。
)以及S曲线,跟踪误差分别如图9~11所示。

图6 三阶加减速曲线轨迹
Fig. 6 Trajectory of three order acceleration and deceleration curve
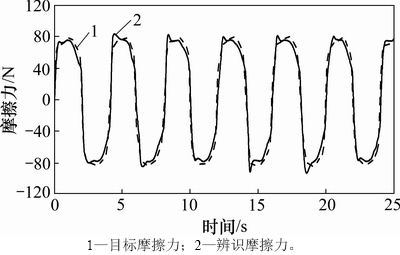
图7 跟踪正弦曲线时的目标摩擦力和辨识摩擦力
Fig. 7 Measured LuGre friction and identified LuGre friction of pneumatic cylinder when tracking sinusoidal curve
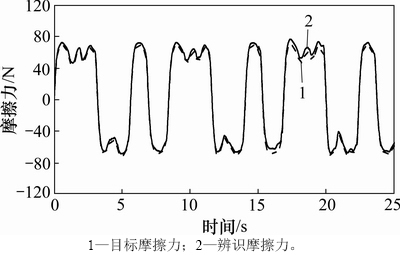
图8 跟踪S曲线时的目标摩擦力和辨识摩擦力
Fig. 8 Measured LuGre friction and identified LuGre friction of pneumatic cylinder when tracking S curve

图9 控制器跟踪0.125sin( )时的跟踪误差
)时的跟踪误差
Fig. 9 Tracking error of controller when tracking 0.125sin()

图10 控制器跟踪0.125sin( )时的跟踪误差
)时的跟踪误差
Fig. 10 Tracking error of controller when tracking 0.125sin()

图11 控制器跟踪S曲线时的跟踪误差
Fig. 11 Tracking error of controller when tracking S curve
分别采用2个性能指标来评价跟踪控制精度:1)最大绝对跟踪误差em,用来衡量控制器瞬态跟踪精度;2) 误差均方根ems,用来衡量控制器的稳态性能。
 (38)
(38)
 (39)
(39)
不同轨迹信号下控制器的跟踪控制效果见表2(其中Am为幅值)。由表2可知:在空载情况下,当气缸跟踪幅值为0.125 m,频率为0.25 Hz的正弦轨迹时,最大绝对跟踪误差为0.707 mm,误差均方根为0.271 mm;当气缸跟踪幅值为0.125 m,频率为0.5 Hz的正弦轨迹时,最大绝对跟踪误差为0.962 mm,误差均方根为0.408 mm;当气缸跟踪自定义的S曲线时,最大绝对跟踪误差为1.013 mm,误差均方根为0.541 mm。最大绝对跟踪误差与幅值比em/Am均小于1%。
表2 不同轨迹信号下控制器的跟踪控制效果
Table 2 Tracking control effects of controller at different trajectory tracking signals

6 结论
1) 提出基于遗传算法的气缸LuGre摩擦模型参数辨识的方法和基于气缸充气腔压力变化的死区辨识方法,使用反步法设计1种有摩擦力补偿和死区补偿的非线性鲁棒控制器。
2) 本文提出的参数辨识方法能够获得准确的参数,辨识方法有效可靠。
3) 控制器具有良好的轨迹跟踪性能,可以实现轨迹跟踪(跟踪峰值小于0.125 m,频率小于0.5 Hz),最大绝对跟踪误差与幅值比em/Am在1%以内。
参考文献:
[1] 孟德远, 陶国良, 钱鹏飞, 等. 气动力伺服系统的自适应鲁棒控制[J]. 浙江大学学报(工学版), 2013, 47(9): 1611-1618.
MENG Deyuan, TAO Guoliang, QIAN Pengfei, et al. Adaptive robust control of pneumatic force servo system[J]. Journal of Zhejiang University(Engineering Science), 2013, 47(9): 1611-1618.
[2] ANDRIGTHETTO P L, VALDIERO A C, CARLOTTO L. Study of the friction behavior in industrial pneumatic actors[J] ABCM Symposium Series in Mechatronics, 2006, 2(2): 369-376.
[3] ARMSTRONG B, DUPONT P, CANUDAS C. A survey of models, analysis tools and compensation methods for the control of machines with friction[J]. Automatica, 1994, 30(7): 1083-1138.
[4] 黄俊, 李小宁. 气缸低速运动摩擦力模型的研究[J]. 机床与液压, 2005, 11(11): 73-75.
HUANG Jun, LI Xiaoning. Study of friction model of cylinder in low-speed motion[J]. Hydraulics Pneumatic & Seals, 2005, 11(11): 73-75.
[5] 陈剑锋, 刘昊, 陶国良. 基于LuGre摩擦模型的气缸摩擦力特性实验[J]. 兰州理工大学学报, 2011, 36(3): 1-5.
CHEN Jianfeng, LIU Hao, TAO Guoliang. Experiment on friction characteristic of pneumatic cylinders based on LuGre model[J]. Journal of Lanzhou University of Technology, 2011, 36(3): 1-5.
[6] 孟德远, 陶国良, 刘昊, 等. 基于LuGre 模型的气缸摩擦力特性研究[J]. 浙江大学学报(工学版), 2012, 46(6): 1027-1033.
MENG Deyuan, TAO Guoliang, LIU Hao, et al. Analysis of friction characteristic of pneumatic cylinders based on LuGre model[J]. Journal of Zhejiang University(Engineering Science), 2012, 46(6): 1027-1033.
[7] SHANG Ce, LIU Hao, ZUO He. Modeling and adaptive robust posture control of 3-RPS pneumatic parallel platform[C]// Proceedings of the ASME 2015 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference. Boston, USA: ASME, 2015: 19-29.
[8] 刘延俊. 气动比例位置系统的控制方法及动态特性研究[D]. 济南: 山东大学机械工程学院, 2008: 30-35.
LIU Yanjun. Study on the control methods and dynamic properties of pneumatic proportional position system[D]. Jinan: Shandong University. School of Mechanical Engineering, 2008: 30-35.
[9] 刘大华. 液压比例方向阀死区辨识新方法[J]. 矿山机械, 2010, 38(24): 63-65.
LIU Dahua. New method of identifying dead zone of hydraulic proportional directional value[J]. Mining and Processing Equipment, 2010, 38(24): 63-65.
[10] CHO S H. Trajectory tracking control of a pneumatic X-Y table using neural network based on PID control[J]. International Journal of Precision Engineering and Manufacturing, 2009, 10(5): 37-44.
[11] TAGHIZADEH M, NAJAFI F, GHAFFARI A. Multi model PD-control of a pneumatic actuator under variable loads[J]. International Journal of Advanced Manufacturing Technology, 2010, 48(5/6/7/8): 655-662.
[12] LEE L, LI I. Wavelet-based adaptive sliding-mode control with H∞ tracking performance for pneumatic servo system position tracking control[J]. IET Control Theory & Application, 2012, 6(11): 1699-1744.
[13] GULATI N, BATH E. A globally stable, load-independent pressure observer for the servo control of pneumatic actuators[J]. IEEE/ASME Transactions on Mechatronics, 2009, 14(3): 295-306.
[14] MOZER Z, TAJTI A, SZENTE V. Experimental investigation on pneumatic components[C]// The 12th International Conference on Fluid Technologies. Budapest, Hungary, 2003, 3(1): 101-109.
[15] PETER B. Pneumatic drives[M]. Berlin, Germany: Springer 2007: 35-37.
[16] CARNEIRO J, ALMEIDA F. Reduced-order thermodynamic models for servo-pneumatic actuator chambers[J]. Journal of System and Control Engineering, 2006, 220(4): 301-313.
[17] YAO B, FANPING B, REEDY J, et al. Adaptive robust motion control of single-rod hydraulic actuators: theory and experiments[J]. IEEE/ASME Transactions on Mechatronics, 2000, 5(1): 79-91.
[18] 孟德远. 高精度气动同步系统研究[D]. 杭州: 浙江大学机械工程学院, 2013: 40-49.
MENG Deyuan. High precision synchronized motion trajectory tracking control of multiple pneumatic cylinders[D]. Hangzhou: Zhejiang University. School of Mechanical Engineering, 2013: 40-49.
[19] 赵翔宇, 蔡惠林. 三次S曲线加减速算法研究[J]. 机械科学与技术, 2016, 35(5): 747-751.
ZHAO Xiangyu, CAI Huilin. Research on the acceleration and deceleration algorithm of cubic S-shape[J]. Mechanical Science and Technology for Aerospace Engineering, 2016, 35(5): 747-751.
[20] 史永丽, 候朝桢. 改进的非线性跟踪微分器设计[J]. 控制与决策, 2008, 23(6): 647-650.
SHI Yongli, HOU Chaozhen. Design of improved nonlinear tracking differentiator[J]. Control and Decision, 2008, 23(6): 647-650.
(编辑 伍锦花)
收稿日期:2017-11-03;修回日期:2018-01-05
基金项目(Foundation item):国家自然科学基金资助项目(51375430) (Project(51375430) supported by the National Natural Science Foundation of China)
通信作者:陶国良,博士,教授,从事气动伺服控制研究;E-mail: gltao@zju.edu.cn

